บทนำ: จังหวะชีพจรของโรงงานสมัยใหม่
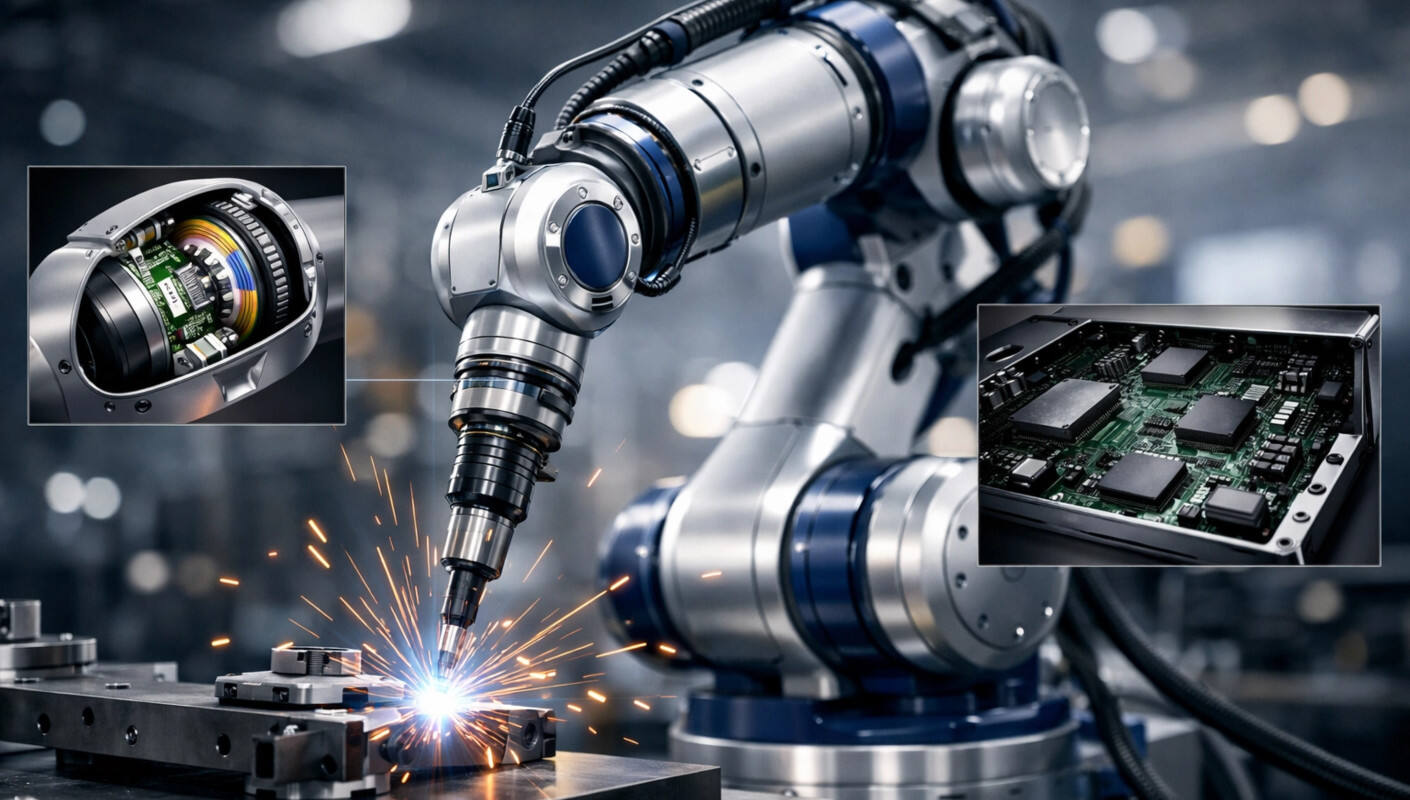
บนพื้นโรงงานผลิตที่มีกำลังการผลิตสูงในอเมริกาเหนือและยุโรป การเคลื่อนไหวอย่างเงียบเชียบและจังหวะสม่ำเสมอของแขนหุ่นยนต์กำหนดจังหวะของการผลิต สำหรับช่างเทคนิคผู้ดูแลรักษาและวิศวกรระบบซึ่งทำหน้าที่ควบคุมเครื่องจักรเหล่านี้ ความสำคัญอันดับหนึ่งคือ ความสามารถในการทำซ้ำ หุ่นยนต์ที่สูญเสียความแม่นยำเพียงเศษส่วนของมิลลิเมตรก็อาจทำให้สายการประกอบทั้งหมดหยุดชะงักได้
ที่ เซินเจิ้นชวนซาง อิเล็กทรอนิกส์ เราเข้าใจดีว่า ความน่าเชื่อถือของหุ่นยนต์แบบหกแกนขึ้นอยู่กับการไหลเวียนของข้อมูลอย่างไร้รอยต่อระหว่างข้อต่อต่างๆ ของมันกับตัวควบคุมกลาง เราจะกล่าวถึงในบทความนี้ว่า วงจรรวมขั้นสูง รวมเข้าด้วยกัน วงจร เซ็นเซอร์ , และ ระบบควบคุมอัตโนมัติ ทำงานร่วมกันอย่างไร เพื่อให้มั่นใจว่าหุ่นยนต์อุตสาหกรรมจะสามารถปฏิบัติงานได้อย่างสม่ำเสมออย่างแท้จริง แม้ในสภาพแวดล้อมที่ท้าทายที่สุด
1. ความท้าทายจากสัญญาณรบกวนแม่เหล็กไฟฟ้าในอุตสาหกรรมหนัก
หนึ่งในอุปสรรคที่สำคัญที่สุดในการใช้งานหุ่นยนต์อุตสาหกรรมคือ การรบกวนทางแม่เหล็กไฟฟ้า ซึ่งมักเรียกกันว่า EMI (Electromagnetic Interference) ในสภาพแวดล้อมโรงงาน มอเตอร์กำลังสูง อุปกรณ์เชื่อมโลหะ และเครื่องจักรหนักจะสร้างสัญญาณรบกวนทางไฟฟ้าปริมาณมหาศาล สำหรับเซ็นเซอร์ภายในหุ่นยนต์ สัญญาณรบกวนเหล่านี้ก็เหมือนหมอกหนาทึบ ซึ่งอาจบิดเบือนสัญญาณที่ส่งข้อมูลตำแหน่งที่แท้จริงของแขนหุ่นยนต์ไปยังตัวควบคุม
การป้องกันเส้นทางสัญญาณ
จากมุมมองของช่างเดินสาย ความเชื่อมต่อทางกายภาพคือแนวป้องกันขั้นแรก ตัวเชื่อมต่อมาตรฐานมักล้มเหลวในสภาพแวดล้อมดังกล่าว เนื่องจากขาดการป้องกันแบบมีประสิทธิภาพเพียงพอ โซลูชันการเชื่อมต่อพิเศษของ Chuanshang อัตโนมัติและการควบคุม มีโครงสร้างฝาครอบที่ป้องกันรอบทิศทาง 360 องศา ออกแบบมาเพื่อให้มั่นใจว่าสัญญาณข้อมูลความเร็วสูง—ซึ่งส่งข้อมูลตำแหน่งที่สำคัญยิ่ง—จะได้รับการปกป้องจากสัญญาณรบกวนทางไฟฟ้าภายนอก ป้องกันไม่ให้เกิดปรากฏการณ์ "jitter" ซึ่งเป็นสาเหตุของข้อผิดพลาดด้านความแม่นยำ
2. ความสอดคล้องกันของผลิตภัณฑ์หลัก: ขับเคลื่อนการประสานงานหลายแกน
หุ่นยนต์อุตสาหกรรมรุ่นใหม่เป็นผลงานชิ้นเอกของการเคลื่อนไหวที่สอดคล้องกันอย่างลงตัว ความสอดประสานนี้จำเป็นต้องอาศัยลำดับชั้นเฉพาะขององค์ประกอบอิเล็กทรอนิกส์:
ก. เซ็นเซอร์ความเร็วสูง: การจับการเคลื่อนไหวแบบเรียลไทม์
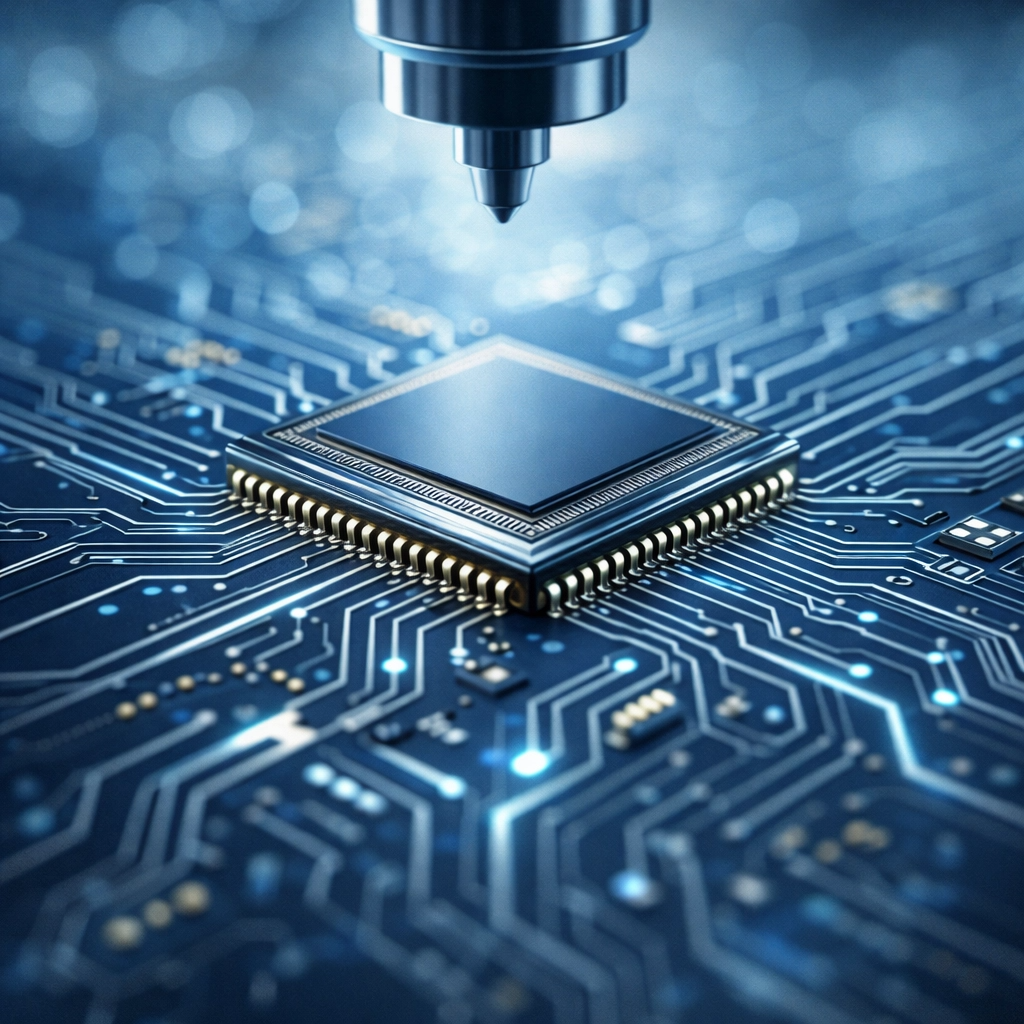
เซ็นเซอร์คือปลายประสาทของหุ่นยนต์ ภายในแต่ละข้อต่อ เครื่องวัดตำแหน่งแบบหมุน (rotary encoders) และเซ็นเซอร์วัดแรงบิด (torque sensors) ต้องตรวจจับการเปลี่ยนแปลงของตำแหน่งและแรงภายในไม่กี่ไมโครวินาที พอร์ตโฟลิโอเซ็นเซอร์ของเราเน้นที่อัตราการสุ่มตัวอย่างสูงและเวลาแฝงต่ำ (low-latency output) โดยการใช้เซ็นเซอร์ที่มีความละเอียดสูง เราจึงสามารถทำให้หุ่นยนต์ปฏิบัติงานที่ต้องการความแม่นยำสูง เช่น การประกอบชิ้นส่วนอิเล็กทรอนิกส์ หรือการปรับเทียบเครื่องมือผ่าตัด ซึ่งไม่มีพื้นที่ให้เกิดข้อผิดพลาดเลย
ข. วงจรรวม (Integrated Circuits): พลังการประมวลผลที่ขับเคลื่อนการเคลื่อนไหว
ข้อมูลจากเซ็นเซอร์เหล่านี้จะต้องได้รับการประมวลผลทันที นี่คือจุดที่ เครื่องวงจรบูรณาการ (IC) ที่ออกแบบมาโดยเฉพาะสำหรับการควบคุมมอเตอร์จะเข้ามามีบทบาทสำคัญ ไอซีเหล่านี้คำนวณอินเวอร์สคิเนเมติกส์ที่ซับซ้อนแบบเรียลไทม์ และปรับกำลังไฟฟ้าที่ส่งไปยังมอเตอร์แต่ละตัวเพื่อรักษาเส้นทางการเคลื่อนที่อย่างราบรื่น ที่บริษัทชวนซาง เรามีไมโครคอนโทรลเลอร์และโปรเซสเซอร์สัญญาณดิจิทัล (DSP) ระดับอุตสาหกรรม ซึ่งได้รับการรับรองให้สามารถทำงานต่อเนื่องได้ตลอด 24 ชั่วโมง เพื่อให้มั่นใจว่า "สมอง" ของหุ่นยนต์จะไม่พลาดแม้แต่จังหวะเดียว
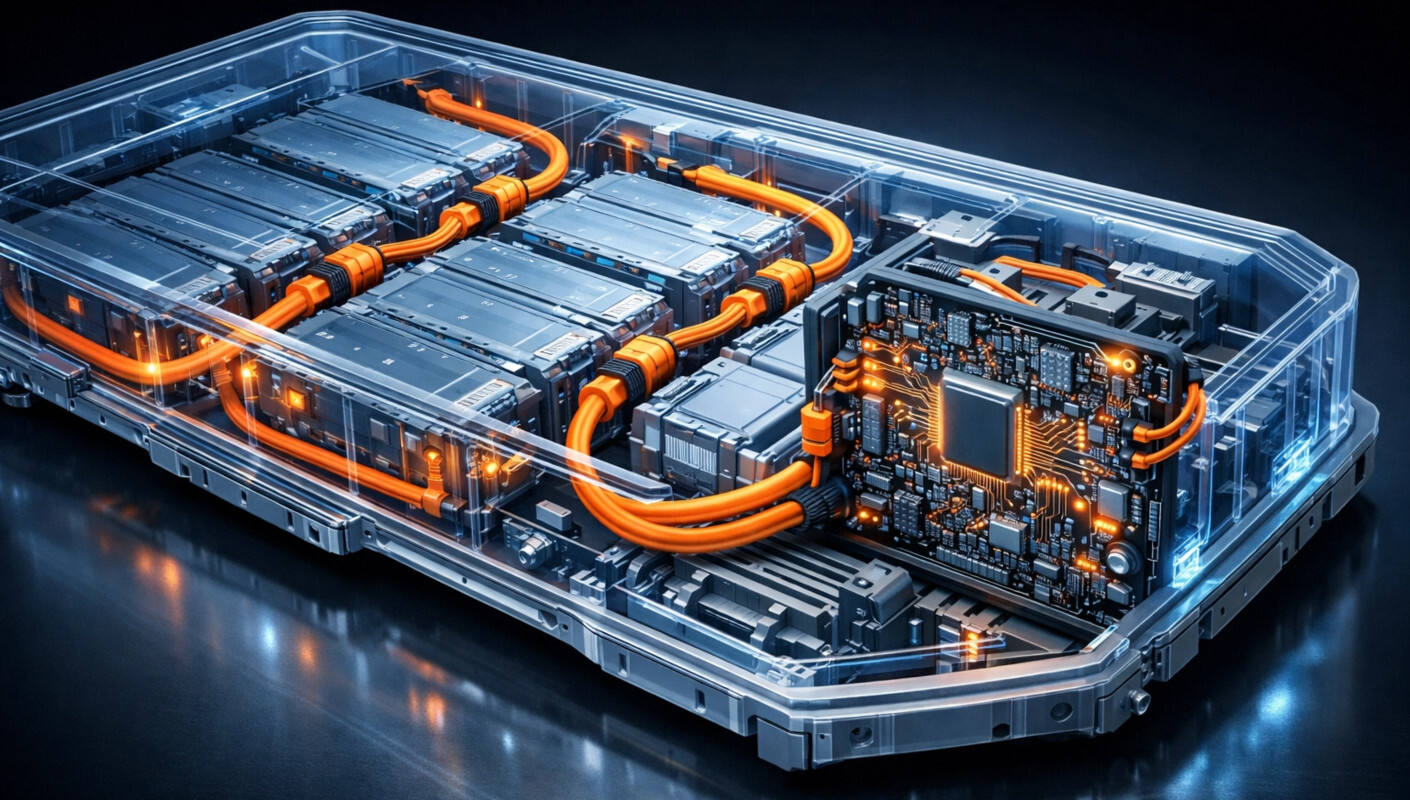
°C ส่วนประกอบแบบพาสซีฟ : ฮีโร่ผู้ไม่ได้รับการกล่าวขานของเสถียรภาพพลังงาน
ขณะที่ IC ทำหน้าที่คิดวิเคราะห์ ส่วนประกอบแบบพาสซีฟ เช่น ตัวเก็บประจุชนิดกรองที่มีค่าความจุสูงและตัวต้านทานความแม่นยำสูง จะทำหน้าที่รับประกันว่าพลังงานที่จ่ายให้กับชิปนั้นมีความสะอาดและมีเสถียรภาพ ในตัวควบคุมหุ่นยนต์ คลื่นแรงดันไฟฟ้าที่เปลี่ยนแปลงอย่างฉับพลันอาจทำให้โปรเซสเซอร์รีเซ็ตได้ โดยการจัดหาตัวเก็บประจุที่มีค่าความต้านทานอนุกรมเทียบเท่าต่ำ (ESR) เราจึงช่วยลูกค้าของเราสร้างโมดูลจ่ายพลังงานที่สามารถทนต่อการสลับกระแสไฟฟ้าอย่างรวดเร็ว ซึ่งจำเป็นสำหรับมอเตอร์เซอร์โวประสิทธิภาพสูง
3. กรณีศึกษาการประยุกต์ใช้งาน: การเพิ่มประสิทธิภาพหุ่นยนต์แบบร่วมมือ (Collaborative Robot) สำหรับงานประกอบที่ต้องการความแม่นยำสูง
ปัญหา: ผู้ผลิตหุ่นยนต์ร่วมมือ (cobots) รายหนึ่งจากทวีปอเมริกาเหนือกำลังเผชิญกับปัญหาเกี่ยวกับรุ่นล่าสุดของหุ่นยนต์ซึ่งใช้ในการบรรจุอุปกรณ์ทางการแพทย์แบบความแม่นยำสูง ระหว่างช่วงเวลาที่หุ่นยนต์ทำงานเต็มกำลัง หุ่นยนต์จะเกิดปรากฏการณ์ "การเคลื่อนคลาดของตำแหน่ง" เป็นครั้งคราว ทำให้จำเป็นต้องปรับเทียบค่าใหม่ด้วยตนเองทุกไม่กี่กะ การตรวจสอบพบว่าปัญหานี้เกิดจากความแปรผันของค่าตำแหน่งเนื่องจากอุณหภูมิ (thermal drift) ภายในตัวแปลงสัญญาณอะนาล็อกเป็นดิจิทัล (analog-to-digital converters) ที่อยู่ในตัวควบคุมข้อต่อ
โซลูชันจาก Chuanshang: แพลตฟอร์มที่มีข้อกำหนดทางเทคนิคสูงกว่า วงจรบูรณาการ พร้อมระบบชดเชยอุณหภูมิในตัว และระบบ โซลูชันแบบฝังตัว ส่วนประกอบของ การป้องกันวงจร เพื่อรองรับแรงดันไฟฟ้ากลับ (back-EMF) ที่เกิดขึ้นระหว่างการหยุดฉุกเฉินได้ดีขึ้น
ผล:
ความเสถียรของการปรับเทียบ: ปัญหาการเคลื่อนคลาดของตำแหน่งถูกแก้ไขอย่างสมบูรณ์ โดยความถี่ในการปรับเทียบค่าใหม่ลดลงจากทุก 8 ชั่วโมง เหลือเพียงทุก 6 เดือน
อายุการใช้งานเชิงปฏิบัติการที่ยาวนาน: หุ่นยนต์แสดงให้เห็นถึงการลดลงอย่างวัดค่าได้ของความร้อนที่เกิดขึ้นภายในตัวเรือนข้อต่อ ซึ่งส่งผลให้อายุการใช้งานที่คาดการณ์ไว้ของซีลมอเตอร์ภายในยาวนานขึ้น
4. การจัดหาความรู้ระดับมืออาชีพ: เข้าใจการป้องกันการแทรกซึม (Ingress Protection) และความทนทานเชิงกล
สำหรับช่างผู้ติดตั้งระบบเหล่านี้ในสภาพแวดล้อมที่รุนแรง ค่าอันดับการป้องกันการแทรกซึม (IP Rating) ถือเป็นข้อกำหนดที่สำคัญที่สุดบนแผ่นข้อมูลจำเพาะ (datasheet)
เหนือกว่าค่าอันดับ: แม้ว่าค่า IP67 จะบ่งชี้ถึงความสามารถในการป้องกันฝุ่นและสามารถจมอยู่ใต้น้ำได้ชั่วคราว แต่ความทนทานเชิงกลของ ขั้วต่อระหว่างวงจร ก็มีความสำคัญไม่แพ้กัน ในหุ่นยนต์ สายเคเบิลจะต้องโค้งงออยู่ตลอดเวลา ซึ่งจำเป็นต้องใช้ขั้วต่อที่รองรับจำนวนรอบการเสียบ-ถอด (mating cycles) สูง และมีกลไกการล็อกที่ป้องกันการสั่นสะเทือน
เคล็ดลับความรู้: เมื่อเลือกขั้วต่อสำหรับอุปกรณ์ปลายแขนหุ่นยนต์ (end-of-arm tooling) ควรเลือกขั้วต่อที่ออกแบบมาเฉพาะสำหรับการใช้งานแบบยืดหยุ่นสูง (high-flex applications) โดยขั้วต่อมาตรฐานอาจเกิดรอยแตกขนาดจุลภาคหลังจากผ่านการใช้งานหลายล้านรอบ ส่งผลให้เกิดความผิดพลาดแบบไม่สม่ำเสมอ ซึ่งยากต่อการวินิจฉัยอย่างมากในโรงงาน
5. การวิเคราะห์อุตสาหกรรม: การเติบโตของเทคโนโลยีคอมพิวติ้งแบบเอจ (Edge Computing) ในวงการหุ่นยนต์
ตลาดอุตสาหกรรมทั่วโลกกำลังเปลี่ยนผ่านสู่แนวคิด "ปัญญาประดิษฐ์แบบขอบเครือข่าย (Edge Intelligence)" โดยแทนที่จะส่งข้อมูลจากเซ็นเซอร์ทั้งหมดกลับไปยังตู้ควบคุมกลาง ปัจจุบันมีการประมวลผลข้อมูลเพิ่มมากขึ้นภายในแขนหุ่นยนต์เอง
ที่บริษัทชวนซ่าง เราสนับสนุนแนวโน้มนี้ด้วยการจัดหา โซลูชันแบบฝังตัว โมดูลขนาดกะทัดรัดแบบบูรณาการที่รวมความสามารถในการประมวลผลและระบบเชื่อมต่อไว้ในตัวเดียวกัน ซึ่งช่วยลดปริมาณสายเคเบิลหนักที่จำเป็นต้องติดตั้งภายในโครงสร้างของหุ่นยนต์ ทำให้แขนหุ่นยนต์มีน้ำหนักเบาลง ทำงานได้เร็วขึ้น และใช้พลังงานอย่างมีประสิทธิภาพมากยิ่งขึ้น สำหรับลูกค้าของเราในภาคยานยนต์ของยุโรป การเปลี่ยนผ่านครั้งนี้ช่วยลดต้นทุนรวมในการถือครอง (Total Cost of Ownership) สำหรับฝูงหุ่นยนต์ของพวกเขาอย่างมีนัยสำคัญ
บทสรุป: วิศวกรรมเพื่ออนาคตของการควบคุมอัตโนมัติ
เป้าหมายของการควบคุมอัตโนมัติในอุตสาหกรรมคือการขจัดความผิดพลาดของมนุษย์และเพิ่มประสิทธิภาพการทำงาน ดังนั้น อุปกรณ์อิเล็กทรอนิกส์พื้นฐานจึงต้องมีคุณภาพสูงสุดจนไม่มีข้อกังขาใดๆ เซินเจิ้นชวนซาง อิเล็กทรอนิกส์ บริษัทฯ มุ่งมั่นที่จะจัดหา เซมิคอนดักเตอร์แบบแยกส่วน (Discrete Semiconductors), วงจรรวม (ICs) , และ เซ็นเซอร์ ที่ทำให้สิ่งนี้เป็นจริงได้
ด้วยการมุ่งเน้นไปที่ความต้องการเฉพาะของผู้ผลิตหุ่นยนต์—ทั้งความมั่นคง ความแม่นยำ และความทนทาน—เราจึงมั่นใจว่าหัวใจของโรงงานสมัยใหม่จะยังคงสูบฉีดอย่างสมบูรณ์แบบตามจังหวะที่ถูกต้อง