Johdanto: Nykyaikaisen tehtaan syke
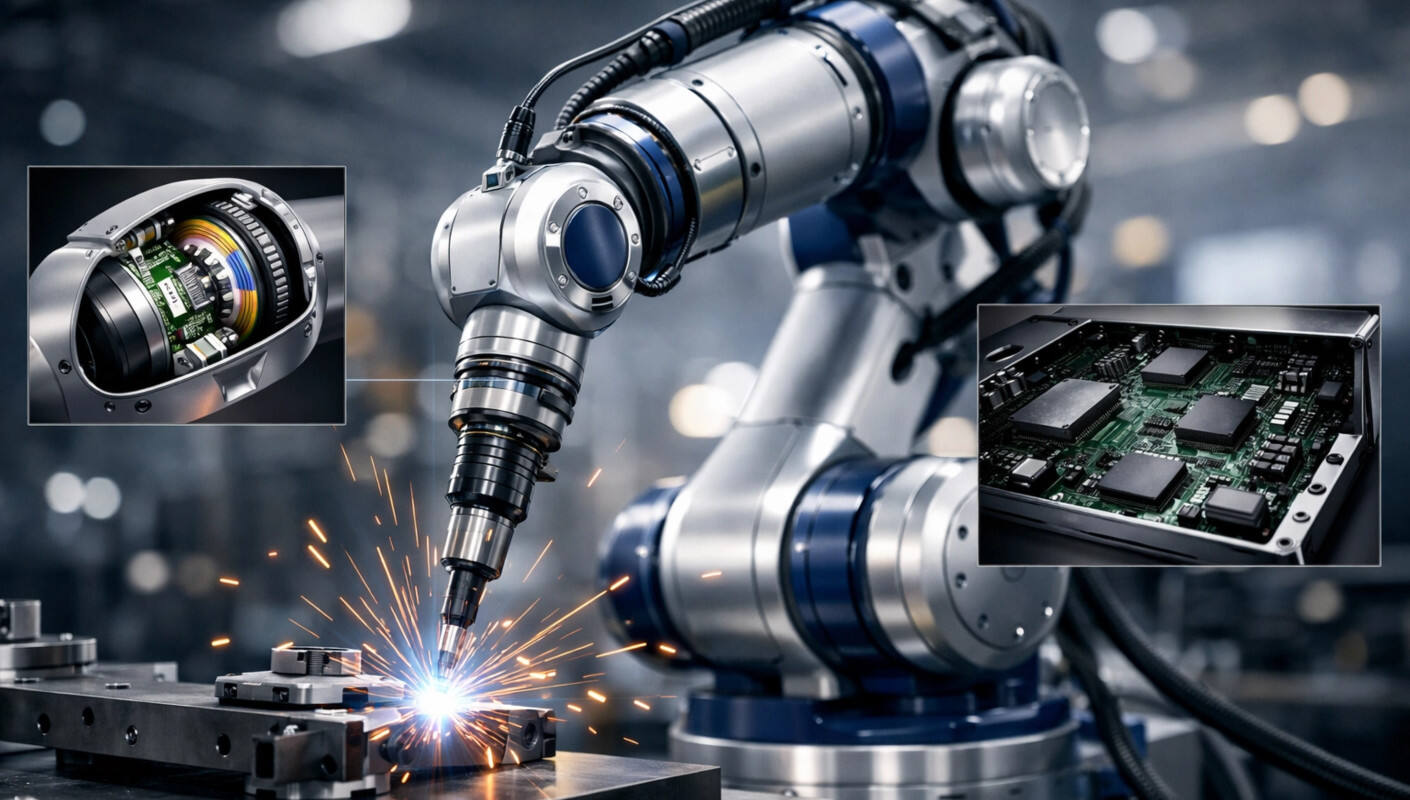
Korkean tuotantokapasiteetin valmistustiloissa Pohjois-Amerikassa ja Euroopassa robottikäsien hiljainen, tahdikas liike määrittelee tuotannon vauhtia. Huoltoteknikkojen ja järjestelmäinsinöörien, jotka valvovat näitä koneita, tärkein tavoite on yksiselitteinen: Toistettavuus robotti, joka menettää tarkkuutensa jopa millimetrin murto-osan, voi pysäyttää koko kokoonpanolinjan.
At Shenzhen Chuanshang Electronics , me ymmärrämme, että kuusiaakselisen robotin luotettavuus riippuu siitä, kuinka saumattomasti tiedot kulkevat sen nivelten ja keskitetyn ohjausyksikön välillä. Tässä artikkelissa tutkitaan, miten edistyneet Integroitu Piirit, anturit , ja Automaatio-ohjaukset toimivat yhdessä varmistaakseen, että teollisuusrobotit toimivat täysin johdonmukaisesti vaativimmassakin ympäristössä.
1. Sähkömagneettisen häferän haaste raskas teollisuudessa
Yksi merkittävimmistä esteistä teollisuusrobotiikassa on Elektromagnetisen häiriön alttiisuus jota kutsutaan usein myös EMI:ksi. Teollisuustuotantoympäristössä tehokkaat moottorit, hitsauslaitteet ja raskas koneisto tuottavat valtavia määriä sähköistä kohinaa. Robotin sisäisille sensoreille tämä kohina on kuin paksu sumu, joka voi vääristää signaaleja, joista ohjain saa tietoa robotin käsivarren tarkasta sijainnista.
Signaalipolun suojaminen
Johtoteknikon näkökulmasta fyysinen yhteys on ensimmäinen puolustuslinja. Standardiyhdistimet epäonnistuvat usein näissä ympäristöissä, koska niissä ei ole riittävää suojaa. Chuanshangin erikoistuneet Automaatio ja ohjausjärjestelmät yhdistintuotteet sisältävät 360 asteen suojatut koteloit. Nämä ratkaisut varmistavat, että korkean nopeuden datasiirtosignaalit – jotka kuljettavat kriittistä sijaintitietoa – ovat suojattuja ulkoiselta sähköiseltä kohinalta, estäen siten "härähtelyn", joka johtaa tarkkuusvirheisiin.
2. Ydintuotteiden synergia: moniakselisen koordinaation ajamista
Moderni teollisuusrobotti on synkronoidun liikkeen mestariteos. Tämä koordinointi vaatii tietyn elektronisten komponenttien hierarkian:
A. Korkean nopeuden anturit: Liikkeen havaitseminen reaaliajassa
Anturit ovat robotin hermoärsykkeitä. Jokaisessa nivelssä pyörivät kooderit ja momenttianturit täytyy havaita paikan ja voiman muutokset mikrosekuntien sisällä. Meidän anturiportfoliomme keskittyy korkeisiin näytteenottotaajuuksiin ja alhaiseen viiveeseen signaalin ulostulossa. Käyttämällä korkearesoluutioisia antureita mahdollistamme robotteja suorittamaan hienovaraisia tehtäviä, kuten elektronisten komponenttien kokoonpanoa tai kirurgisten välineiden kalibrointia, joissa virhe ei ole sallittu.
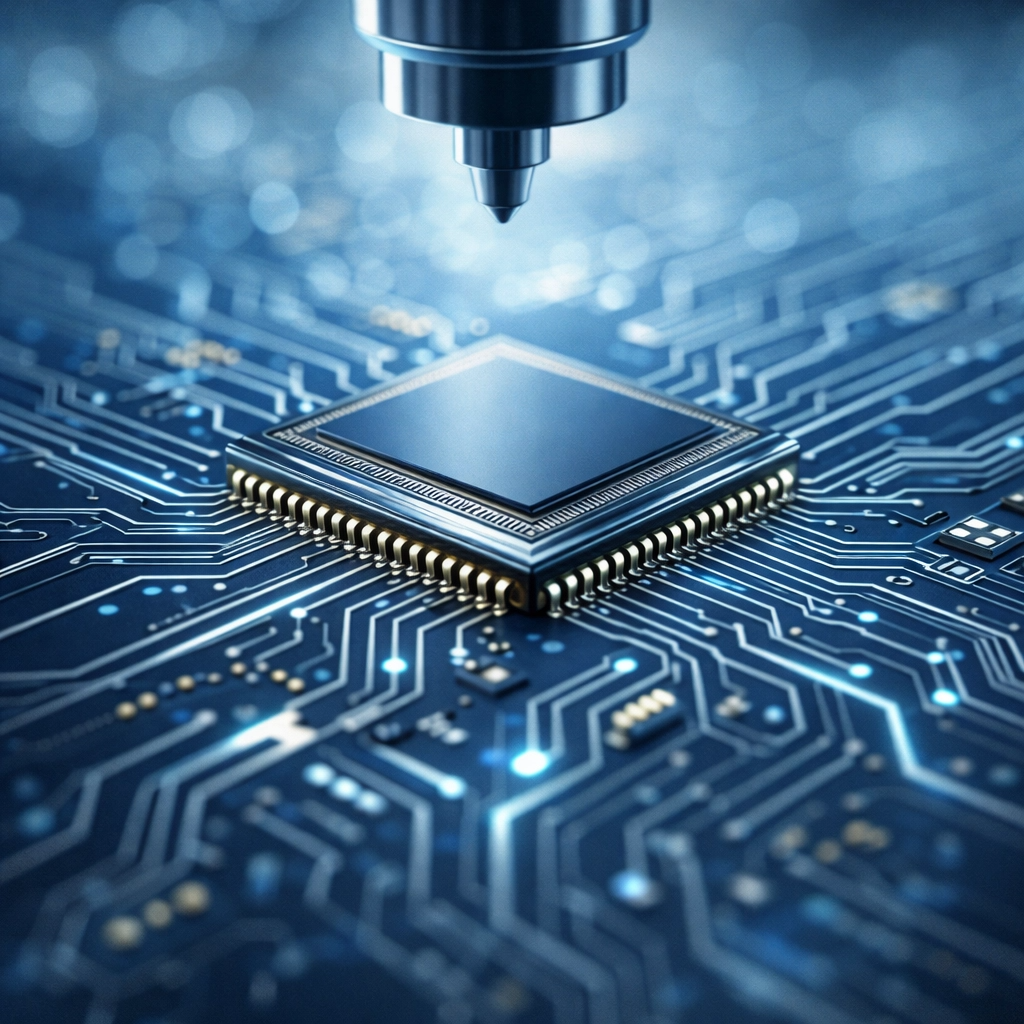
B. Integroidut piirit: Liikkeen taustalla oleva prosessointiteho
Näistä antureista saadut tiedot täytyy käsitellä välittömästi. Tässä vaiheessa Integroidut piirit (PIR-komponentit), jotka on suunniteltu erityisesti moottorien ohjaukseen, tulevat käyttöön. Nämä PIR-komponentit laskevat monimutkaisia käänteisiä kinematiikkaa reaaliajassa ja säätävät jokaiseen moottoriin lähetettävää tehoa pitääkseen polun tasaisena. Chuanshang tarjoaa teollisuuden luokan mikro-ohjaimia ja digitaalisia signaaliprosessoreja, jotka on luokiteltu jatkuvaksi, kahvikymmenen tunnin toiminnalle, mikä varmistaa, että robotin "aivot" eivät koskaan väistä.
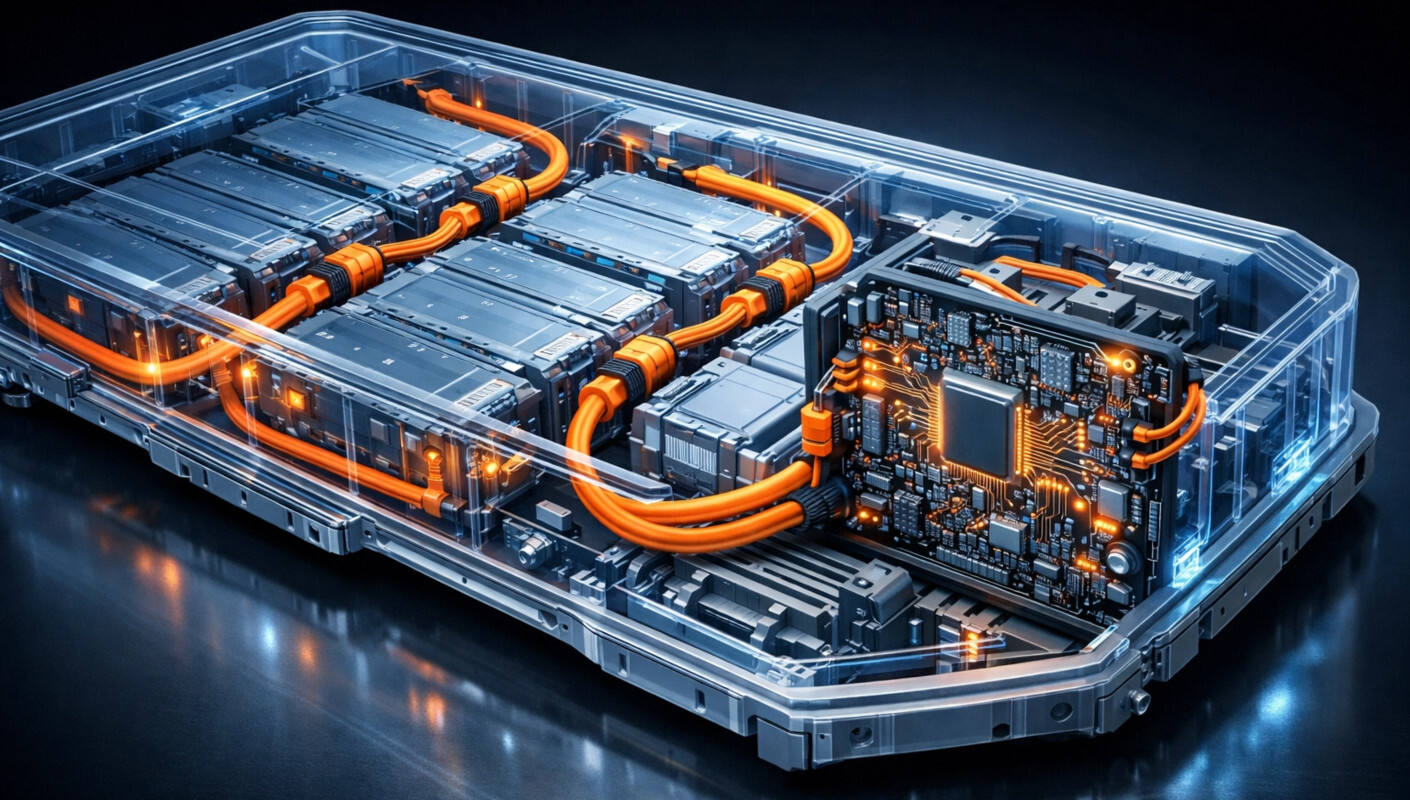
C. Se on Passiiviset komponentit : Voiman vakauden tuntemattomat sankarit
Kun PIR-komponentit tekevät ajattelua, Passiiviset komponentit kuten suurikapasiteettiset suodatinkondensaattorit ja tarkkuusvastukset varmistavat, että piireihin syötetään puhdasta ja vakaata virtaa. Robottiohjaimessa äkillinen jänniteheilahtelu voi aiheuttaa prosessorin nollautumisen. Alhaisen ekvivalenttisen sarjavastuksen kondensaattoreiden käyttöönotolla autamme asiakkaitamme rakentamaan tehomoduuleja, jotka kestävät korkean suorituskyvyn servomoottoreiden vaatimaa nopeaa virtakytkentää.
3. Sovellustapaus: Yhteistyörobottien optimointi tarkkuusasennukseen
Ongelma: Pohjoisamerikkalainen yhteistyörobottien (cobottien) valmistaja kohtasi ongelmia uusimman mallinsa kanssa, jota käytetään tarkkuuslääketieteellisten laitteiden pakkaamiseen. Huippukäyttötilanteissa robotit kokivat joskus "aseman siirtymää", mikä vaati manuaalisen uudelleenkalibroinnin muutaman työvuoron välein. Tämä johtui lämpösiirtymästä liitosohjainten analogi-digitaali-muuntimissa.
Chuanshangin ratkaisu: Tiimin suositus oli siirtyä korkeampaa spesifikaatiota olevaan Johdevyöhyke alustaan, jossa on sisäänrakennettu lämpötilakorvaus ja vankempi Upotettu ratkaisu liitosviestintäväylälle. Ehdotimme myös Piirien suojaaminen komponenttien päivitystä, jotta ne kestäisivät paremmin hätäpysäytyksissä syntyvää takaisinindusoitunutta jännitettä (back-EMF).
Tulos:
Kalibrointivakaus: Aseman siirtymäongelma poistettiin kokonaan, ja uudelleenkalibrointitarve muuttui kerran kahdeksan tunnin välein kerran kuuden kuukauden välein.
Käyttöikä: Robotit osoittivat mitattavan lämmönmuodostuksen vähenemisen liitoskoteloissa, mikä pidentää sisäisten moottorisulkkujen odotettua käyttöikää.
4. Ammattimaisen tiedon tarjoaminen: Tiedot kosteuden ja pölyn tunkeutumisen estämisestä (Ingress Protection) sekä mekaanisesta kestävyydestä
Työntekijöille, jotka asentavat näitä järjestelmiä vaativiin ympäristöihin, kosteuden ja pölyn tunkeutumisen estämisluokitus (IP-luokitus) on tärkein tekninen eritelmä teknisessä tiedossa.
Luokituksen yli: Vaikka IP67-luokitus tarkoittaa suojaa pölyltä ja tilapäistä upotusta veteen, mekaaninen kestävyys on Yhdysjohtimet yhtä tärkeä. Robotiikassa kaapelit taipuvat jatkuvasti. Tämä edellyttää liittimiä, joilla on korkea kytkentäsyklien määrä ja värähtelynsuojattu lukitusmekanismi.
Tietotips: Valittaessa liittimiä robottien "käsivarren päässä" olevaa työkalua varten tulee aina etsiä niitä, jotka on suunniteltu korkeataipuisiin sovelluksiin. Standardipinnit voivat kehittää mikroskooppisia halkeamia miljoonien kytkentäsyklien jälkeen, mikä johtaa välillä esiintyviin vioihin, joita on erityisen vaikea diagnosoida tehdastuotannossa.
5. Teollisuusanalyysi: Reunakäsitelyn nousu robotiikassa
Maailmanlaajuinen teollisuusmarkkina siirtyy kohti "reunälyä". Sen sijaan, että kaikki anturidata lähetettäisiin takaisin keskitettyyn kaappiin, yhä enemmän dataa käsitellään itse robottikäsivarsessa.
Chuanshang tukee tätä trendiä tarjoamalla Upotettujen ratkaisujen jotka yhdistävät laskentatehon ja yhteyden muodostamisen yhteen tiukkaan moduuliin. Tämä vähentää robottirakenteen sisällä vaadittavan raskaan kaapeloinnin määrää, mikä tekee käsivarret kevyemmiksi, nopeammiksi ja energiatehokkaammiksi. Euroopan autoteollisuuden asiakkaillemme tämä siirtymä vähentää merkittävästi heidän robottifleetinsä kokonaishoito- ja omistuskustannuksia.
Johtopäätös: Tekniikan suunnittelu automaation tulevaisuutta varten
Teollisen automaation tavoitteena on poistaa ihmisvirheet ja lisätä tehokkuutta. Tätä varten perustana olevien elektronisten komponenttien on oltava moitteeton. Shenzhen Chuanshang Electronics on omistautunut tarjoamaan korkealaatuisia Diskreettejä puolijohtimia ja integroituja piirejä (IC:tä) , ja Anturit jotka mahdollistavat tämän.
Keskittämällä huomiomme robottivalmistajien erityistarpeisiin—vakaus, tarkkuus ja kestävyys—varmistamme, että modernin tehtaan sydän jatkaa lyöntiään täydellisessä tahdissa.