מבוא: הדופק של המפעל המודרני
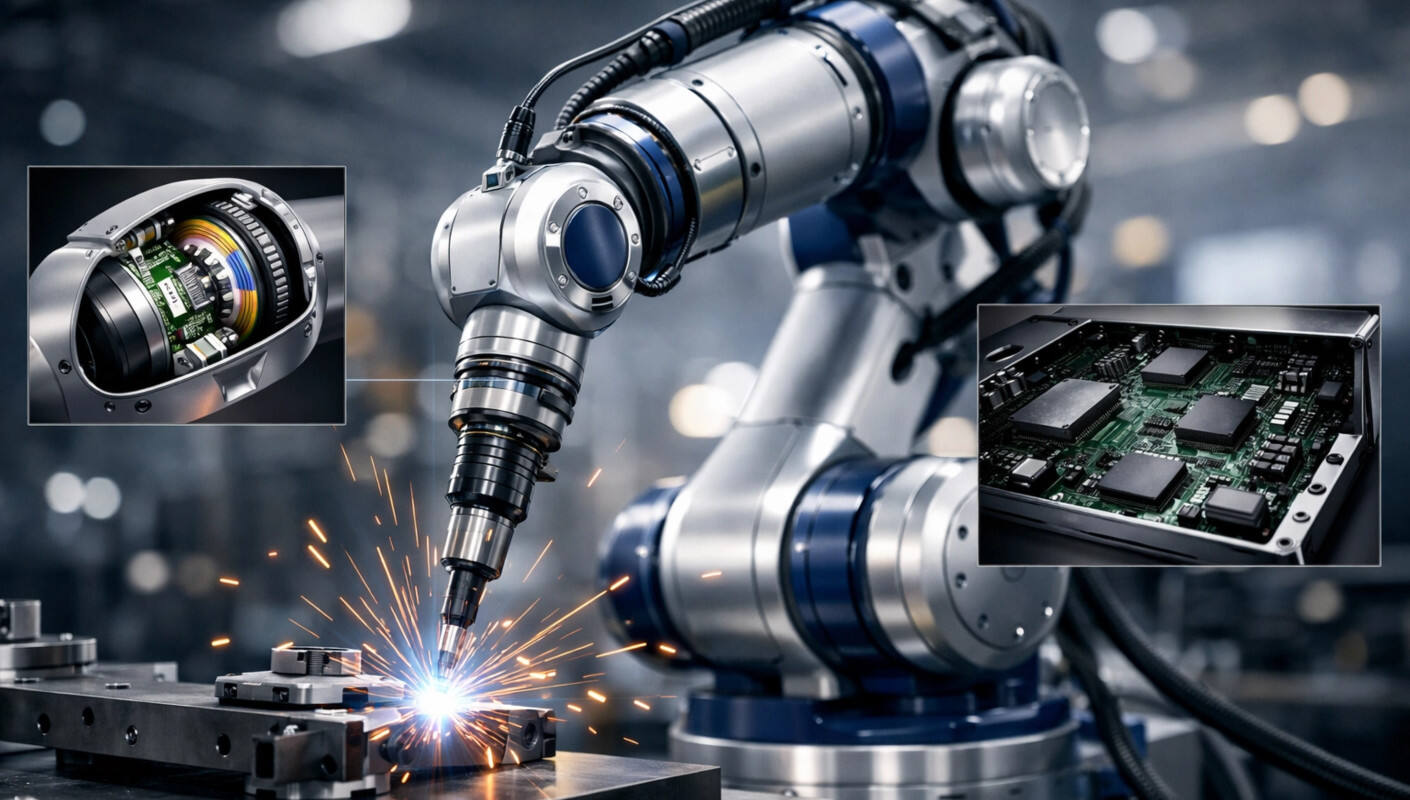
במפעלי היצור בעלי תפוקה גבוהה בצפון אמריקה ואירופה, התנועה השקטה והמקצבית של זרועות רובוטיות מגדירה את קצב הייצור. עבור טכנאי תחזוקה ומהנדסי מערכות שמנטרים על מכונות אלו, העדיפות היא אחת בלבד: הֲדִירוּת רובוט שאיבד את דיוקו אפילו בשבריר מילימטר יכול לעצור את כל קו ה ensamble.
ב שנצ'ן צ'ואןשאן אלקטרוניקס , אנו מבינים כי אמינותו של רובוט בעל שש דרגות חופש תלויה בזרימה חלקה של נתונים בין המפרקים שלו לבין הבקר המרכזי שלו. מאמר זה חוקר כיצד מעגלים משולבים מתקדמים, משולב מעגלים, חיישנים , ו בקרים אוטומטיים פועלים יחד כדי להבטיח שרובוטים תעשייתיים יבצעו את פעולתם באופן עקבי לחלוטין בסביבות הקשות ביותר.
1. האתגר של הפרעות אלקטרומגנטיות בתעשייה הכבדה
אחת המכשולים המשמעותיים ביותר ברובוטיקה תעשייתית היא פריעות אלקטרומגנטיות לעיתים קרובות נקראת EMI. בסביבת מפעל, מנועים בעלי הספק גבוה, ציוד לרתכה ומכונות כבדות יוצרים כמויות עצומות של רעש חשמלי. עבור חיישנים פנימיים של רובוט, הרעש הזה דומה לערפל צפוף, שיכול לעוות את האותות המודיעים למפקח בדיוק באיזו מיקום נמצא הזרוע הרובוטית.
השמדת מסלול האות
מנקודת מבט של טכנאי חיווט, החיבור הפיזי הוא קו ההגנה הראשון. מחברים סטנדרטיים בדרך כלל נכשלים בסביבות אלו מכיוון שחסינותם אינה מספקת. הפתרונות המיוחדים להתחברות של Chuanshang כוללים מעטפות משומרות ב-360 מעלות. אוטומציה ושליטה עיצובים אלו מבטיחים שאותות נתוני מהירות גבוהה — הנושאים מידע קריטי על מיקום — محمים מפני רעש חשמלי חיצוני, ומונעים את ה"רטט" שגורם לשגיאות דיוק.
2. סינרגיה בין המוצרים המרכזיים: הפעלת התיאום רב הצירים
רובוט תעשייתי מודרני הוא יצירת מופת של תנועה מסונכרנת. סנכרון זה דורש היררכיה מסוימת של רכיבים אלקטרוניים:
א. חיישנים מהירים: לכידת התנועה בזמן אמת
החיישנים הם נקודות הקצה העצביות של הרובוט. בכל מפרק, מקודדים סיבוביים וחיישני מומנט חייבים לזהות שינויים במיקום ובכוח תוך מיקרו-שניות. תיקיית החיישנים שלנו מתמקדת בדרישות של קצב דגימה גבוה ופלט בעל עיכוב נמוך. באמצעות שימוש בחיישנים בעלי רזולוציה גבוהה, אנו מאפשרים לרובוטים לבצע משימות עדינות, כגון הרכבת רכיבי אלקטרוניקה או קליברציה של כלים כירורגיים, שבהן אין שום מקום לשגיאה.
ב. מעגלים משולבים: כוח העיבוד שמאחורי התנועה
הנתונים מהחיישנים הללו חייבים לעובד באופן מיידי. כאן נכנס לתמונה מעגלים משולבים (מעגלים משולבים) שתוכננו במיוחד לבקרת מנועים נכנסים לתמונה. מעגלים משולבים אלו מחשבים ביצירת זמן אמת קינמטיקה הפוכה מורכבת, ומסדרים את ההספק שנשלח לכל מנוע כדי לשמור על מסלול חלק. בחואנשאן אנו מספקים מיקרו-בקרים ומעבדי אותות דיגיטליים ברמה תעשייתית שדורגים לפעילות רציפה של 24 שעות, מה שמבטיח שה"מוח" של הרובוט לעולם לא יפספס פעימה.
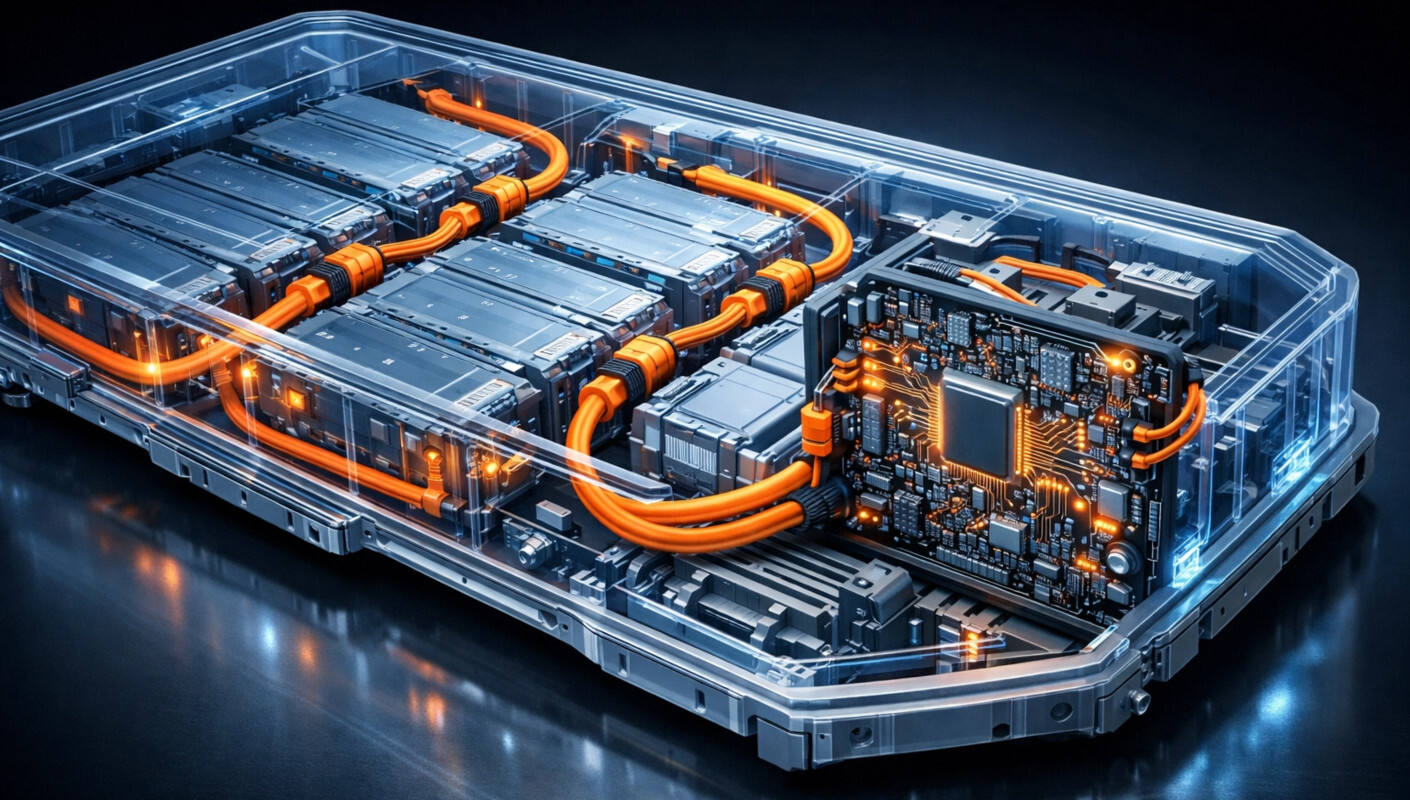
°C. רכיבים פסיביים : הגיבורים הבלתי נראים של יציבות ההספק
בעוד שמעגלים משולבים מבצעים את החשיבה, רכיבים פסיביים כגון קondenסטורים מסננים בעלי קיבול גבוה ונגדים מדויקים, מובילים לכך שהמתח שסופק למעגלים הוא נקי ויציב. בבקר רובוטי, גלגול מתח פתאומי עלול לגרום לאיפוס של המעבד. על ידי ספקי קondenסטורים עם התנגדות סדרתית שקולה נמוכה, אנו עוזרים ללקוחותינו לבנות מודולי כוח אשר יכולים לעמוד בשינויי זרם המהירים הנדרשים על ידי מנועי סרוו ביצועים גבוהים.
3. מקרה יישום: אופטימיזציה של רובוט שיתופי לMontage מדויק
הבעיה: יצרן צפוני אמריקאי של רובוטים שיתופיים (קוברובוטים) נתקל בבעיה עם המודל החדש ביותר שלו, המשמש באריזת מכשירי רפואה מדויקים. במהלך שעות הפעולה המקסימליות, הרובוטים חוו לעתים קרובות "הסטת מיקום", מה שדרש את הביצוע ידני של איפוס מחדש כל כמה משמרות. בעיה זו נמצאה כנובעת מהשתנות טרמית בממירם האנלוגי-ספרתי בתוך בקרות המפרקים.
הפתרון של צ'ואנשאן: הקבוצה שלנו המליצה על מעבר לפלטפורמה עם مواصفות גבוהות יותר מעגל משולב עם פונקציית תקן טרמי מובנית ומערכת תקשורת חזקה יותר פתרון משובץ למגשע התכנון של קו התקשורת בין המפרקים. כמו כן, המלצנו לשדרג את הגנה הגנה על המעגלים הרכיבים כדי להתמודד טוב יותר עם הכוח המניע הנגדי (back-EMF) שנוצר בעת עצירות חירום.
התוצאה:
יציבות האיפוס: הבעיה של ההסטה הושמטה לחלוטין, והדרישה לאיפוס מחדש השתנתה מפעם כל שמונה שעות לפעם כל שישה חודשים.
תכולת פעילות ארוכת טווח: הרובוטים הראו ירידה מדידה בייצור החום בתוך מעטפות המפרקים, מה שמרחיב את משך החיים הצפוי של חותמות המנוע הפנימיות.
4. אספקת ידע מקצועי: הבנת דרגת הגנה מפני חדירה ועמידות מכנית
לעובדים המתקינים מערכות אלו בסביבות קשות, דרגת הגנה מפני חדירה (IP) היא הדרישה החשובה ביותר בגיליון הנתונים.
מעבר לדרגה: אם כי דרגת IP67 מציינת הגנה מפני אבק ומשימה זמנית במים, העמידות המכנית של חיבורים אינה פחות חשובה. ברובוטיקה, כבלים נמצאים בתנועה מתמדת. לכן נדרשים חיבורים בעלי מספר רב של מחזורי חיבור והסרה, וכן מנגנוני נעילה עמידים לרעידות.
טיפ ידע: בבחירת חיבורים לציוד בקצה הזרוע הרובוטית ("end-of-arm"), יש תמיד לבחור בחיבורים שתוכננו ליישומים עם גמישות גבוהה. פינים סטנדרטיים עלולים לפתח סדקים זעירים לאחר מיליוני מחזורים, מה שמוביל לתקלות לא קבועות שקשה מאוד לאתרן בשטח המפעל.
5. ניתוח התעשייה: עליית המחשוב הקצה-ברובוטיקה
השוק התעשייתי הגלובלי מזדחל לכיוון "אינטליגנציה בקצה הרשת". במקום לשלוח את כל נתוני החיישנים חזרה למגירת בקרה מרכזית, עיבוד רב יותר מתבצע בתוך הזרוע הרובוטית עצמה.
בצ'ואנשאן, אנו תומכים במגמה זו על ידי ספק פתרונות משובצים שמשלבים כוח עיבוד ויכולת קישוריות במודול אחד, קטן ומקוצר. זה מפחית את כמות הכבלים הכבדים הנדרשים במבנה הזרוע הרובוטית, מה שהופך את הזרועות לקלות יותר, מהירות יותר ויעילות יותר מבחינת צריכת אנרגיה. עבור לקוחותינו במערכת האוטומובילית באירופה, המעבר הזה מפחית באופן משמעותי את עלות הבעלות הכוללת של צי הזרועות הרובוטיות שלהם.
מסקנה: הנדסה לעתיד האוטומציה
מטרת האוטומציה התעשייתית היא להסיר שגיאות אנושיות ולהגביר את היעילות. כדי להשיג זאת, האלקטרוניקה הבסיסית חייבת להיות ללא פגם. שנצ'ן צ'ואןשאן אלקטרוניקס מחויב לספק את הסמיקונדקטורים הבודדים והמעגלים המשולבים (ICs) סמיקונדקטורים בודדים, מעגלים משולבים (ICs) , ו חיישנים הגבוהים באיכות שמאפשרים זאת.
על ידי התמקדות בצרכים הספציפיים של יצרני רובוטים — יציבות, דיוק ועמידות — אנו מבטיחים שלב השדרה של המפעל המודרני ימשיך לפעולה בקצב מושלם.