Įvadas: šiuolaikinės gamyklos ritmas
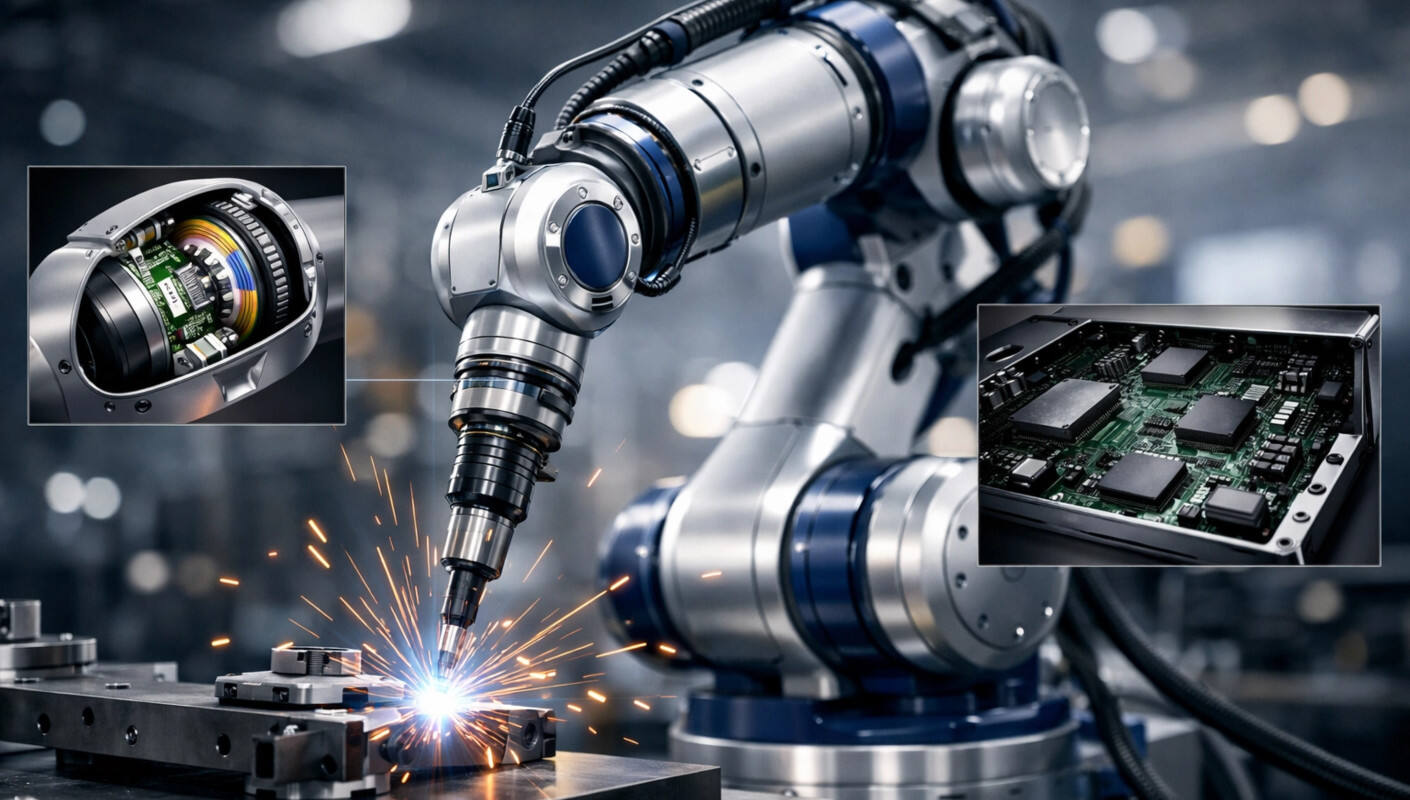
Šiaurės Amerikos ir Europos aukšto našumo gamybos įmonių gamykliniuose paviršiuose tylūs, ritmiški robotų rankų judesiai nustato gamybos tempą. Priežiūros technikams ir sistemų inžinieriams, kurie prižiūri šiuos įrenginius, vienintelis prioritetas yra Pakartojamumas . Net nedidelis robotų tikslumo nuokrypis – net mažiau nei milimetro dalis – gali sustabdyti visą surinkimo liniją.
At Šenzheno Chuanshang elektronikos , mes suprantame, kad šešių ašių robotų patikimumas priklauso nuo duomenų srauto tarp jo sąnarių ir centro valdiklio vientisumo. Šiame straipsnyje nagrinėjama, kaip pažangūs Integruotais Grandinės, jutikliai , ir Automatizavimo valdymas veikia kartu, kad pramoniniai robotai veiktų absoliučiai nuosekliai labiausiai reikalaujančiose aplinkose.
1. Elektromagnetinės triukšmų problemos sunkiosios pramonės srityje
Viena didžiausių kliūčių pramonės robotikoje yra Elektromagnetinė traukimas , dažnai vadinama EMI. Gamyklos aplinkoje didelės galios varikliai, suvirinimo įranga ir sunkioji technika sukuria milžinišką kiekį elektrinio triukšmo. Robotų vidiniams jutikliams šis triukšmas panašus į tankų rūką ir gali iškraipyti signalus, kurie valdymo sistemai nurodo tikslų robotinės rankos padėtį.
Signalų kelio apsauga
Iš laidų montuotojo perspektyvos fizinis ryšys yra pirmoji gynybos linija. Standartiniai jungikliai dažnai nepavyksta šiose aplinkose, nes jiems trūksta tinkamos apsaugos. Chuanshang specializuotos Automatizacija ir valdymo sistemos jungiamosios sistemos turi 360 laipsnių apsaugotus korpusus. Šios konstrukcijos užtikrina, kad aukšto dažnio duomenų signalai – perduodantys kritinės reikšmės pozicijos informaciją – būtų apsaugoti nuo išorinio elektrinio triukšmo, neleisdami atsirasti „drebėjimui“, kuris sukelia tikslumo klaidas.
2. Pagrindinių produktų sinergija: daugiapakopės koordinavimo skatinimas
Šiuolaikinis pramoninis robotas yra sinchronizuotų judesių meistriškumo kūrinys. Šiam koordinavimui reikia specifinės elektroninių komponentų hierarchijos:
A. Didelio greičio jutikliai: judesių fiksavimas realiuoju laiku
Jutikliai yra roboto nervų galūnės. Kiekviename sąnaryje sukamieji koduokliai ir sukimo jėgos jutikliai turi aptikti padėties ir jėgos pokyčius per mikrosekundes. Mūsų jutiklių asortimentas orientuotas į aukštą imčių dažnį ir žemą uždelstumą išvedant signalus. Naudojant aukštos raiškos jutiklius, leidžiame robotams atlikti delikalius uždavinius, pvz., elektroninių komponentų surinkimą ar chirurginių įrankių kalibravimą, kur neleidžiama daryti jokių klaidų.
B. Integrinės schemos: judesių valdymo apdorojimo galia
Šių jutiklių duomenys turi būti nedelsiant apdoroti. Tai vyksta ten, kur Integruoti schemai (IC) specialiai sukurti variklių valdymui. Šie IC realiuoju laiku apskaičiuoja sudėtingą atvirkštinę kinematiką, koreguodami į kiekvieną variklį siunčiamą galią, kad būtų išlaikoma lygi trajektorija. „Chuanshang“ tiekiame pramoninio lygio mikrovaldiklius ir skaitmeninius signalų procesorius, kurie yra sertifikuoti nepertraukiamai veikti 24 valandas per parą, užtikrindami, kad robotų „smegenys“ niekada nesustotų.
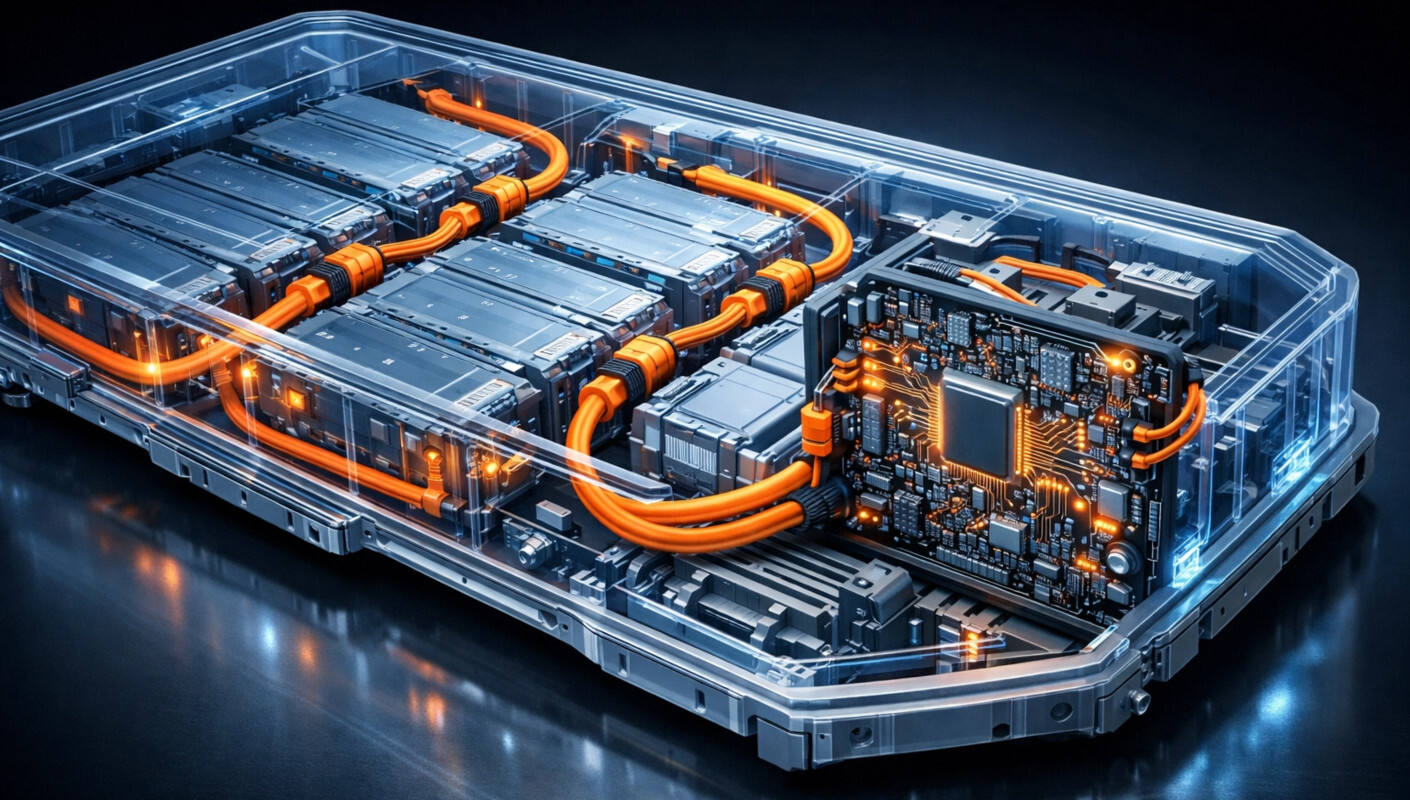
°C. Pasyvūs komponentai : Nepastebimi galios stabilumo herojai
Kol IC atlieka mąstymą, Pasyvūs komponentai pvz., didelės talpos filtravimo kondensatoriai ir tikslūs rezistoriai užtikrina, kad į mikroschemas tiekiamos galios parametrai būtų švarūs ir stabilūs. Robotų valdiklyje staigus įtampos svyravimas gali sukelti procesoriaus paleidimą iš naujo. Pateikdami kondensatorius su maža ekvivalenčia nuosekliaja varža, padedame savo klientams sukurti maitinimo modulius, kurie gebėtų atlaikyti aukštos našumo servovariklių reikalaujamus staigius srovės jungimo ciklus.
3. Taikymo atvejo tyrimas: bendradarbiaujančiojo robotų tikslaus surinkimo optimizavimas
Problema: Šiaurės Amerikos bendradarbiaujančių robotų (kobotų) gamintojas susidūrė su problema, kai jo naujausioji modelio versija, naudojama tiksliai medicinos prietaisų pakuotėms, veikdavo maksimaliu našumu. Ūminėse veiklos valandomis robotai kartais patirdavo „padėties nukrypimą“, dėl ko reikėdavo atlikti rankinę perkalinibravimą kas kelias pamainas. Ši problema buvo nustatyta kaip šiluminis nukrypimas analoginio-skaitmeninio keitiklyje, esančiame sąnarių valdikliuose.
Čuanšano sprendimas: Mūsų komanda rekomendavo pereiti prie aukštesnės specifikacijos Integrinės schemos platformos su įmontuota temperatūros kompensacija ir patikimesne Įterptąja sistema sąnarių ryšio magistralei. Taip pat pasiūlėme atnaujinti Elektrinė apsauga komponentus, kad jie geriau ištvertų atsirandančią grįžtamąją elektrovarą (back-EMF) aviarinės sustabdymo metu.
Rezultatas:
Kalibravimo stabilumas: Nukrypimo problema buvo pašalinta, todėl perkalinibravimo reikalavimas sumažėjo nuo vieno karto per aštuonias valandas iki vieno karto per šešis mėnesius.
Eksploatacinis ilgaamžiškumas: Robotai parodė matomą šilumos gamybos sumažėjimą jungčių korpusuose, todėl išorinių variklių sandarinimo tarpinės tarnaus ilgiau.
4. Profesinės žinios apie įėjimo apsaugą ir mechaninę tvirtumą:
Darbuotojams, montuojantiems šiuos sistemas sunkiomis sąlygomis, įėjimo apsaugos (IP) klasifikacija yra svarbiausias techninio aprašo parametras.
Už klasifikacijos ribų: Nors IP67 klasifikacija reiškia apsaugą nuo dulkių ir trumpalaikio panardinimo į vandenį, taip pat vienodai svarbus yra „ Jungtukams “ mechaninis tvirtumas. Robotikoje laidai nuolat lenkiami. Todėl reikalingi sujungimo elementai, turintys didelį sujungimų skaičių ir vibracijoms atsparius užrakinimo mechanizmus.
Žinių patarimas: Pasirinkdami jungtukus robotų „rankos galui“ („end-of-arm“) visada ieškokite tų, kurie sukurti aukštos lankstumo programoms. Standartiniai kontaktai po milijonų ciklų gali suskilti mikroskopinėmis įtrūkimais, dėl ko kyla laikinosios gedimo būsenos, kurias gamykloje labai sunku aptikti.
5. Pramonės analizė: kraštutinės skaičiavimo technologijos („Edge Computing“) kilimas robotikoje
Viso pasaulio pramonės rinka juda link „kraštutinės intelektualiosios sistemos“ („Edge Intelligence“). Vietoj to, kad visus jutiklių duomenis siųstume į centrinį šaukštą, vis daugiau apdorojimo vyksta pačioje robotų rankoje.
„Chuanshang“ mes palaikome šią tendenciją teikdami Įmontuotųjų sprendimų modulius, kurie viename kompaktiškame bloke sujungia apdorojimo galios ir ryšio funkcijas. Tai sumažina robotų konstrukcijoje reikalingų sunkių laidų kiekį, todėl rankos tampa lengvesnės, greitesnės ir energijos naudojimą efektyvesnės. Mūsų klientams Europos automobilių sektoriuje šis poslinkis žymiai sumažina jų robotų parko bendrąsias savinimo išlaidas.
Išvada: inžinerija automatizacijos ateities vystymui
Pramonės automatizacijos tikslas – pašalinti žmogiškąjį klaidų faktorių ir padidinti efektyvumą. Tam elektroninės sistemos, kurios tai leidžia, turi būti be priekaištų. Šenzheno Chuanshang elektronikos skirta teikti aukštos kokybės Diskretieji puslaidininkiai, integrinės schemos , ir Jutikliai kurios tai leidžia.
Kreipdamiesi į robotų gamintojų specifinius poreikius – stabilumą, tikslumą ir ilgaamžiškumą – užtikriname, kad šiuolaikinės gamyklos širdis toliau plaktų idealiai laiku.