Introducción: El pulso de la fábrica moderna
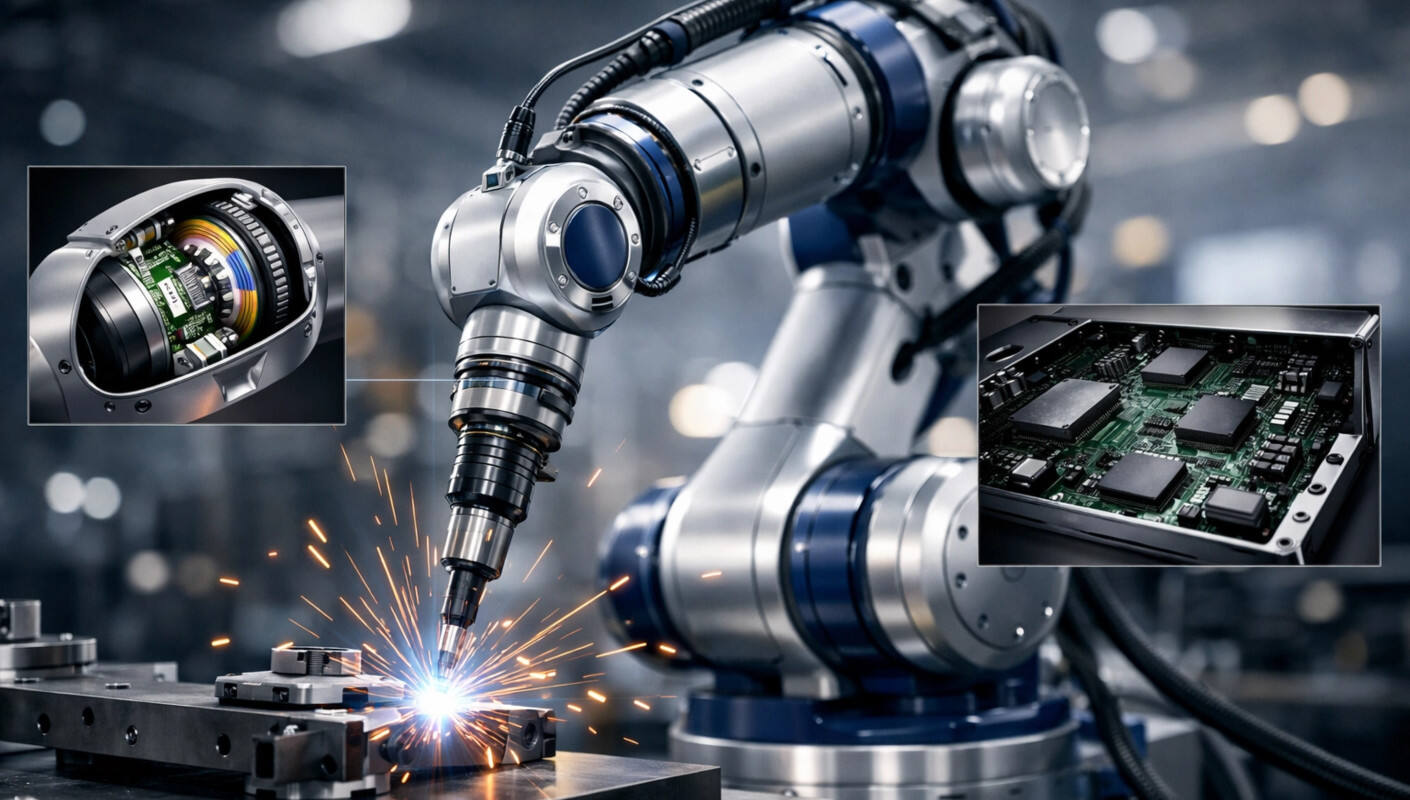
En las plantas de fabricación de alto rendimiento de Norteamérica y Europa, el movimiento silencioso y rítmico de los brazos robóticos define el ritmo de la producción. Para los técnicos de mantenimiento y los ingenieros de sistemas que supervisan estas máquinas, la prioridad es única: Repetibilidad un robot que pierde su precisión incluso en una fracción de milímetro puede detener toda una línea de montaje.
En Shenzhen Chuanshang Electronics en nuestra empresa, entendemos que la fiabilidad de un robot de seis ejes depende del flujo ininterrumpido de datos entre sus articulaciones y su controlador central. Este artículo explora cómo los avanzados Integrado Circuitos, Sensores , y Controles de automatización trabajan conjuntamente para garantizar que los robots industriales operen con una consistencia absoluta en los entornos más exigentes.
1. El reto de la interferencia electromagnética en la industria pesada
Uno de los obstáculos más significativos en la robótica industrial es Interferencia electromagnética , comúnmente denominada interferencia electromagnética (EMI). En un entorno fabril, los motores de alta potencia, los equipos de soldadura y las máquinas pesadas generan cantidades masivas de ruido eléctrico. Para los sensores internos de un robot, este ruido es como una niebla espesa, que puede distorsionar las señales que indican al controlador la posición exacta del brazo robótico.
Protección de la trayectoria de la señal
Desde la perspectiva de un técnico en cableado, la conexión física constituye la primera línea de defensa. Los conectores estándar suelen fallar en estos entornos porque carecen de un apantallamiento adecuado. Las soluciones especializadas de interconexión de Chuanshang cuentan con carcasas apantalladas de 360 grados. Automatización y controles estos diseños garantizan que las señales de datos de alta velocidad —que transportan información crítica de posicionamiento— estén protegidas frente al ruido eléctrico externo, evitando el «jitter» que provoca errores de precisión.
2. Sinergia del producto principal: Impulso de la coordinación multi-eje
Un robot industrial moderno es una obra maestra de movimiento sincronizado. Esta coordinación requiere una jerarquía específica de componentes electrónicos:
A. Sensores de alta velocidad: captura del movimiento en tiempo real
Los sensores son las terminaciones nerviosas del robot. En cada articulación, los codificadores rotativos y los sensores de par deben detectar cambios en la posición y la fuerza dentro de microsegundos. Nuestro portafolio de sensores se centra en altas tasas de muestreo y salidas de baja latencia. Al utilizar sensores de alta resolución, permitimos que los robots realicen tareas delicadas, como el ensamblaje de componentes electrónicos o la calibración de instrumentos quirúrgicos, donde no hay margen para errores.
B. Circuitos integrados: la potencia de procesamiento detrás del movimiento
Los datos procedentes de estos sensores deben procesarse de forma instantánea. Aquí es donde Circuitos integrados (CIs) especialmente diseñados para el control de motores entran en juego. Estos CIs calculan en tiempo real complejas cinemáticas inversas, ajustando la potencia enviada a cada motor para mantener una trayectoria suave. En Chuanshang, ofrecemos microcontroladores y procesadores de señal digital (DSP) de grado industrial, calificados para funcionamiento continuo las veinticuatro horas del día, lo que garantiza que el "cerebro" del robot nunca pierda un latido.
°C. Componentes pasivos : Los héroes anónimos de la estabilidad de la potencia
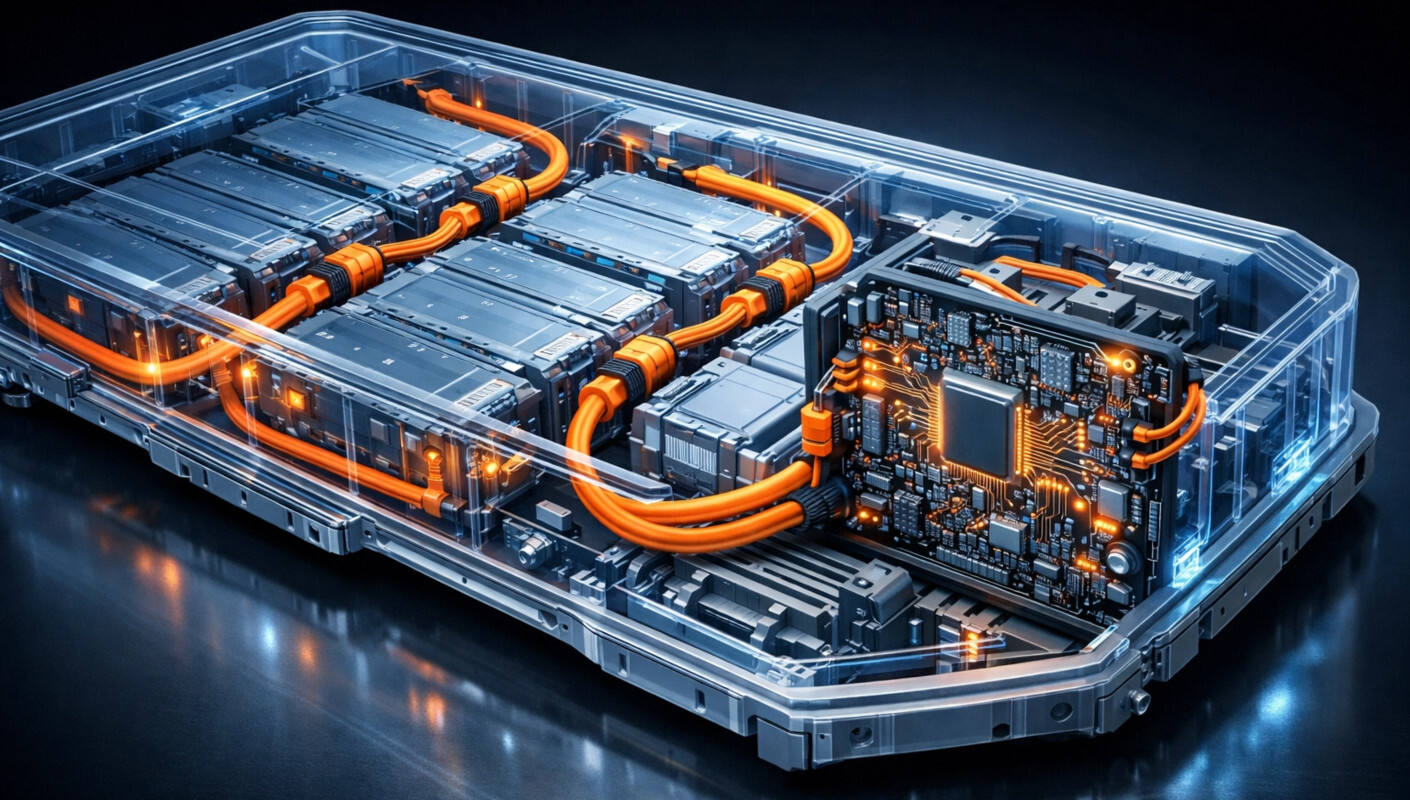
Mientras que los CIs realizan el procesamiento, Componentes pasivos como condensadores de filtrado de alta capacidad y resistencias de precisión, aseguran que la alimentación suministrada a los circuitos integrados sea limpia y estable. En un controlador robótico, una fluctuación repentina de voltaje puede provocar un reinicio del procesador. Al suministrar condensadores con baja resistencia serie equivalente (ESR), ayudamos a nuestros clientes a construir módulos de alimentación capaces de soportar los rápidos cambios de corriente requeridos por los motores servo de alto rendimiento.
3. Estudio de caso de aplicación: optimización de un robot colaborativo para ensamblaje de precisión
El problema: Un fabricante norteamericano de robots colaborativos (cobots) enfrentaba un desafío con su último modelo, utilizado en el empaque preciso de dispositivos médicos. Durante las horas de operación máxima, los robots experimentaban ocasionalmente una "deriva posicional", lo que requería una recalibración manual cada pocos turnos. Esto se debió a la deriva térmica en los convertidores analógico-digitales dentro de los controladores de articulación.
La solución Chuanshang: Nuestro equipo recomendó una transición a una plataforma de mayor especificación Circuito integrado con compensación de temperatura integrada y un bus de comunicación para articulaciones más robusto Solución Embebida componentes Protección de circuitos para manejar mejor la fuerza contraelectromotriz (back-EMF) generada durante las paradas de emergencia.
El resultado:
Estabilidad de la calibración: El problema de deriva se eliminó por completo, pasando el requisito de recalibración de una vez cada ocho horas a una vez cada seis meses.
Durabilidad operativa: Los robots mostraron una disminución medible en la generación de calor dentro de las carcasas de las articulaciones, lo que prolonga la vida útil esperada de los sellos internos del motor.
4. Suministro de conocimientos profesionales: Comprensión de la protección contra la entrada de cuerpos extraños y la resistencia mecánica
Para los trabajadores que instalan estos sistemas en entornos agresivos, la clasificación de protección contra la entrada de cuerpos extraños (IP) es la especificación más importante en la hoja de datos.
Más allá de la clasificación: Aunque una clasificación IP67 indica protección contra el polvo y la inmersión temporal en agua, la resistencia mecánica del Interconexiones es igualmente fundamental. En robótica, los cables se flexionan constantemente. Esto exige conectores con un elevado número de ciclos de acoplamiento y mecanismos de bloqueo resistentes a las vibraciones.
Consejo técnico: Al seleccionar conectores para herramientas robóticas de «extremo de brazo», busque siempre aquellos diseñados específicamente para aplicaciones de alta flexibilidad. Los contactos estándar pueden desarrollar grietas microscópicas tras millones de ciclos, lo que provoca fallos intermitentes especialmente difíciles de diagnosticar en la planta de fabricación.
5. Análisis del sector: El auge de la computación en el borde (edge computing) en robótica
El mercado industrial global se está desplazando hacia la «Inteligencia en el Borde». En lugar de enviar todos los datos de los sensores a un armario central, se está realizando una mayor cantidad de procesamiento directamente dentro del propio brazo robótico.
En Chuanshang, estamos apoyando esta tendencia al ofrecer Soluciones Integradas módulos integrados que combinan potencia de procesamiento y conectividad en un único módulo compacto. Esto reduce la cantidad de cableado pesado necesario en la estructura del robot, lo que hace que los brazos sean más ligeros, más rápidos y más eficientes energéticamente. Para nuestros clientes del sector automotriz europeo, este cambio está reduciendo significativamente el costo total de propiedad de sus flotas robóticas.
Conclusión: Ingeniería para el futuro de la automatización
El objetivo de la automatización industrial es eliminar los errores humanos y aumentar la eficiencia. Para lograrlo, la electrónica subyacente debe ser irreprochable. Shenzhen Chuanshang Electronics está comprometida con el suministro de componentes electrónicos de alta calidad Semiconductores discretos, circuitos integrados (CI) , y Sensores que hacen esto posible.
Al centrarnos en las necesidades específicas de los fabricantes de robots —estabilidad, precisión y durabilidad— garantizamos que el corazón de la fábrica moderna siga latiendo con una sincronización perfecta.