Sissejuhatus: Kaasaegse töotsemise pulss
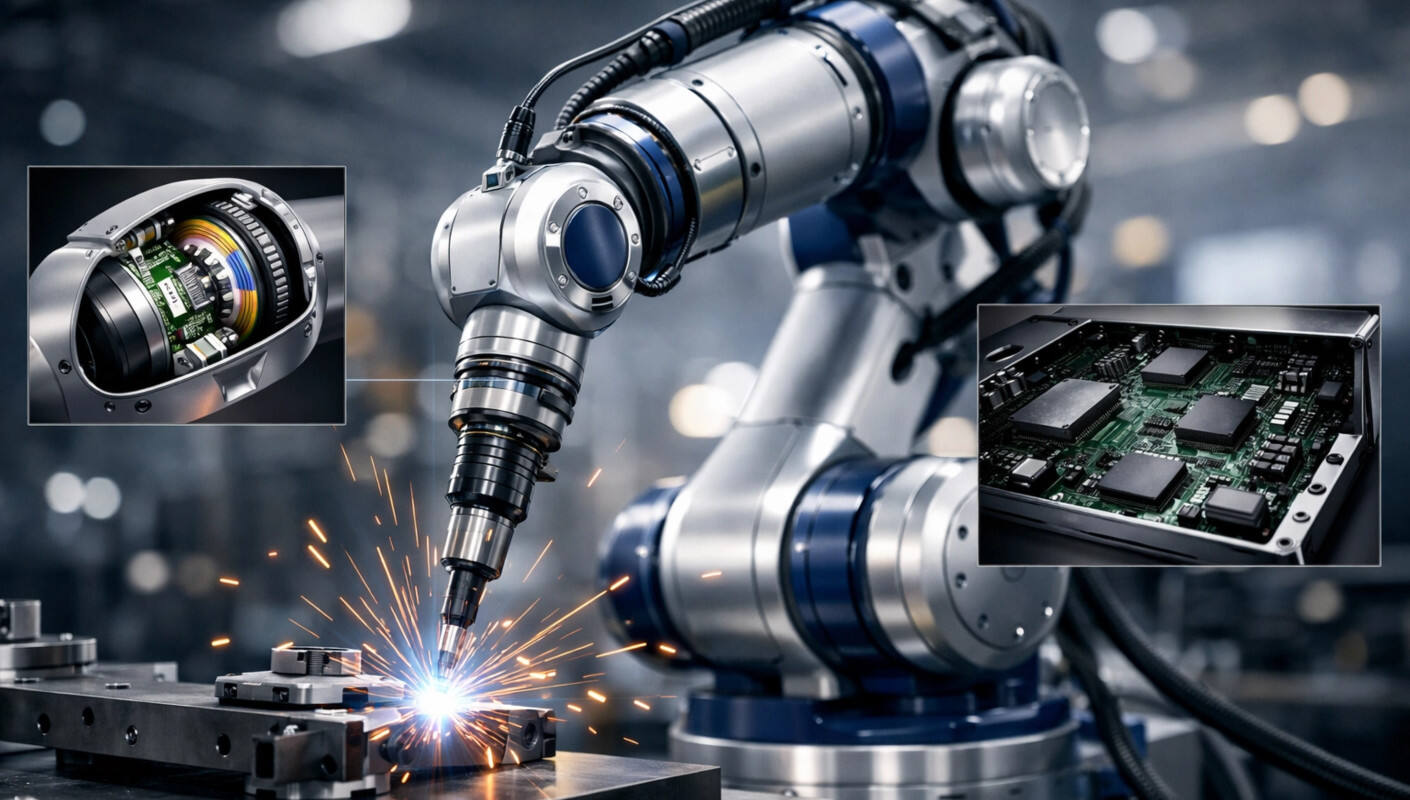
Kõrgtootlikkusega tootmisrajatiste põrandatel Põhja-Ameerikas ja Euroopas määrab robottõukurite vaikne, rütmiline liikumine tootmise tempot. Hooldustehnikute ja süsteemiinseneride jaoks, kes neid masinaid jälgivad, on prioriteet üheselt suunatud: Korratavus robottõukur, mis kaotab oma täpsuse isegi millimeetri murdosas, võib peatada terve monteerimisjoone.
At Shenzhen Chuanshang Electronics , me teame, et kuuest teljest koosneva roboti usaldusväärsus sõltub andmete õnnetust vaba vahetamisest tema liigendite ja keskse juhtseadme vahel. Selles artiklis uuritakse, kuidas täppistehnoloogilised Integreeritud Mikrokiibid, sensorid , ja Automaatjuhtimissüsteemid koostöös tagavad, et tööstusrobotid toimivad kõige nõudvamates keskkondades absoluutselt konstantselt.
1. Elektromagnetilise häiresignaali probleem tööstusrobotite puhul
Tööstusrobotite puhul üks olulisemaid takistusi on Elektromagnetiline häire mida nimetatakse sageli EMI-ks. Tööstuslikus keskkonnas teevad suure võimsusega mootorid, keevitusseadmed ja raske masinavarustus elektrilist müra väga palju. Roboti sisemiste sensorite jaoks on see müra nagu paks udus, mis võib moonutada signaale, mis juhtimisseadmele täpselt ütlevad, kus roboti käsi asub.
Signaalitee ekraanimaine kaitse
Juhtmetehniku vaatenurgast on füüsiline ühendus esimene kaitsejoon. Standardühendused ei toimi sellistes keskkondades sageli, sest neil puudub piisav ekraanimaine kaitse. Chuanshangi spetsiaalsed Automaatika ja juhtimissüsteemid ühenduslahendused on varustatud 360-kraadise ekraanimaise korpusaga. Need konstruktsioonid tagavad, et kõrgkiiruselised andmesignaalid – mis kannavad olulisi asukohateavet – on kaitstud väliste elektriliste müra eest ning vältivad "värinat", mis põhjustab täpsusvigasid.
2. Põhitoodete sünergia: mitme telje koordineerimise juhtimine
Modernne tööstusrobot on sünkroonitud liikumise meistertöö. Selle koordineerimiseks on vajalik kindel elektroonikakomponentide hierarhia:
A. Kõrgkiiruslikud andurid: liikumise registreerimine reaalajas
Andurid on roboti närvilõpmed. Iga liigese puhul peavad pöördeandurid ja pöördemomenti andurid tuvastama asukoha ja jõu muutusi mikrosekundites. Meie andurite portfell keskendub kõrgtehtavusele ja väikese viivitusega väljundile. Kasutades kõrglahutusega andureid, võimaldame robotitel täita täpsust nõudvaid ülesandeid, näiteks elektroonikakomponentide paigaldamist või kirurgiliste instrumentide kalibreerimist, kus vigadele ei ole ruumi.
B. Integreeritud ahelad: liikumise taga olev töötlemisvõimsus
Nendest anduritest saadud andmeid tuleb töödelda kohe. Siin astuvad esile Integraalskeemid (IC-d), mis on spetsiaalselt mõeldud mootorijuhtimiseks, saavad kasutusele. Need IC-d arvutavad reaalses ajas keerukaid pöördkinemaatilisi valemeid ja kohandavad iga mootorisse saadetavat võimsust, et säilitada sujuv liikumisraadius. Chuanshangis pakume tööstusliku klassi mikrokontrollereid ja digitaalseid signaaliprotsessoreid, millel on kindlaks määratud pidev, kahekümne neli tundi kestev töörežiim, tagades, et roboti "aju" ei jäta kunagi ühtegi lööki.
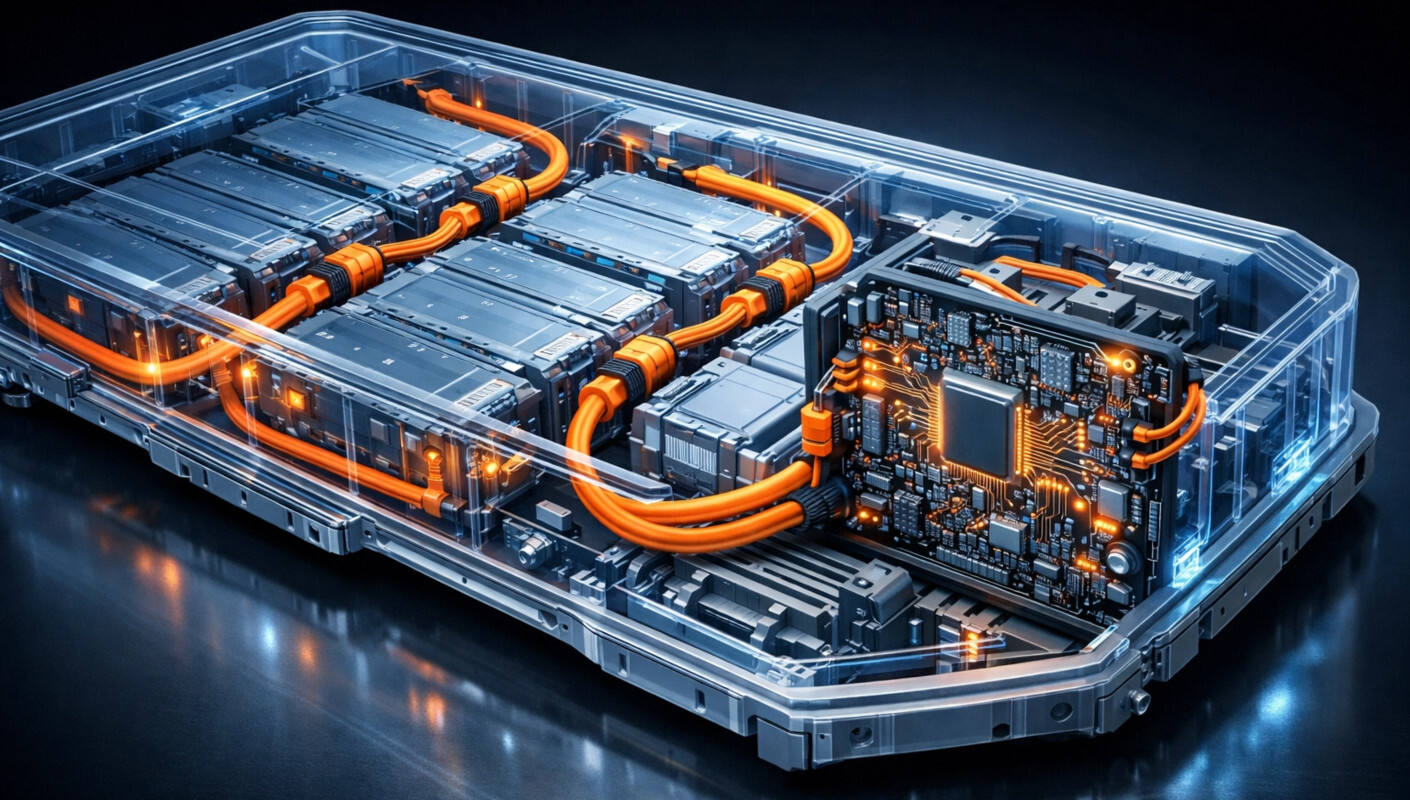
C. Passiivkomponendid : Vähepeetud tegurid võimsuse stabiilsuses
Kui IC-d teevad mõtlemist, Passiivkomponendid nt suurmahtuvuse filtrikondensaatorid ja täpsusresistordid tagavad, et kiipidele tarnitav võimsus on puhas ja stabiilne. Robootilises juhtimisseadmes võib äkiline pingevõnkumine põhjustada protsessori lähtestumise. Madala ekvivalentse jadamise takistusega kondensaatorite kasutamisega aitame meie klientidel luua võimsusmooduleid, mis suudavad vastu pidada kõrgtehniliste servo-mootorite nõutavale kiirele voolu lülitumisele.
3. Rakendusjuhtumiuuring: Koostöörroboti optimeerimine täpsusmontaažiks
Probleem on selles, et Põhja-Ameerika tootja, kes valmistab koostöörobotid (coboteid), silmitses oma viimase mudeli – täpsuspakendusseadmete jaoks mõeldud meditsiiniseadmete pakendamiseks – probleemiga. Tippkoormuse ajal tekkisid robotitel sageli „asendikõikumised“, mis nõudsid käsitsi taaskalibreerimist iga mõne töövahetuse järel. See oli seotud liituri juhtimissüsteemis asuvate analoog-digitaalteisendajate soojusliku kõikumisega.
Chuanshangi lahendus: Meie meeskond soovitas üleminekut kõrgema spetsifikatsiooniga Integreeritud ahelale platvormile, millel on sisseehitatud temperatuurikompensatsioon ja tugevam Sisseehitatud lahendus liituri suhtlusautobussi jaoks. Soovituslik oli ka Sirkli kaitse komponentide vahetamine, et paremini taluda äkki peatamisel tekkivat tagasipinge EMF-i.
Tulemus:
Kalibreerimise stabiilsus: Kõikumisprobleem kaotati täielikult, nii et taaskalibreerimise vajadus muutus iga kahe tunni järel iga kuue kuu järel.
Töökindlus: Robotid näitasid mõõdetavat soojuseeraldumise vähenemist liitumiskorpustes, mis pikendab sisemiste mootorite tihendite eeldatavat eluiga.
4. Professionaalne teadmiste pakkumine: Sissepääsu kaitse ja mehaaniline vastupidavus
Töötajatele, kes paigaldavad neid süsteeme rasketes keskkondades, on sissepääsu kaitse (IP) klassifikatsioon andmete lehel olulisim tehniline näitaja.
Klassifikatsioonist kaugemale: Kuigi IP67-klassifikatsioon tähendab kaitset tolmu ja ajutise veepiisamise eest, on Ühendustele võrdselt olulised ka mehaaniliselt. Robotite puhul painduvad kaablid pidevalt, mistõttu on vajalikud ühenduspesad, millel on suur ühendusarv ja vibratsioonikindlad lukustusmehhanismid.
Teadmiste nipp: Kui valite ühendusliideseid robotite "käe otsa" tööriistade jaoks, pöörake alati tähelepanu neile, mis on loodud kõrgeläbimurdmisega (high-flex) rakendusteks. Standardsete kontaktide pinnale võib tekkida mikroskoopilisi pragusid pärast miljoneid tsükleid, mis põhjustab ajutisi tõrkeid, mida tehases on äärmiselt raske diagnoosida.
5. Tööstusanalüüs: Robotite valdkonnas kasvav servaarvutus (Edge Computing)
Globaalne tööstuslik turu suundub üha rohkem „servaintelligentsuse“ poole. Selle asemel, et saata kogu sensorandmed tagasi kesksele paigaldisele, toimub rohkem töötlemist ise roboti käe sees.
Chuanshangis toetame seda trendi, pakkudes Sisseehitatud lahendused mooduleid, mis ühendavad töötlusvõimsuse ja ühendatavuse ühes kompaktsetes moodulites. See vähendab roboti konstruktsioonis vajaliku raskete kaablite kogust, muutes käed kergemaks, kiiremaks ja energiasäästlikumaks. Meie klientidele Euroopa autotööstuses on see muutus oluliselt vähendanud nende robotifloti üldkulusid.
Järeldus: Tuleviku automaatika ehitamine
Tööstusautomaatika eesmärk on inimvigu vältida ja tõhustada tööd. Selle saavutamiseks peavad aluseks olevad elektroonikakomponendid olema täiesti usaldusväärsed. Shenzhen Chuanshang Electronics on pühendunud kvaliteetsete Diskreetsete pooljuhtide, integraalskeemide , ja Andurid pakumisele, mis seda võimaldab.
Keskendudes robotitootjate konkreetsetele vajadustele – stabiilsusele, täpsusele ja vastupidavusele – tagame, et kaasaegse tehase süda lööb edasi täiusliku täpsusega.