مقدمه: ضربان کارخانهٔ مدرن
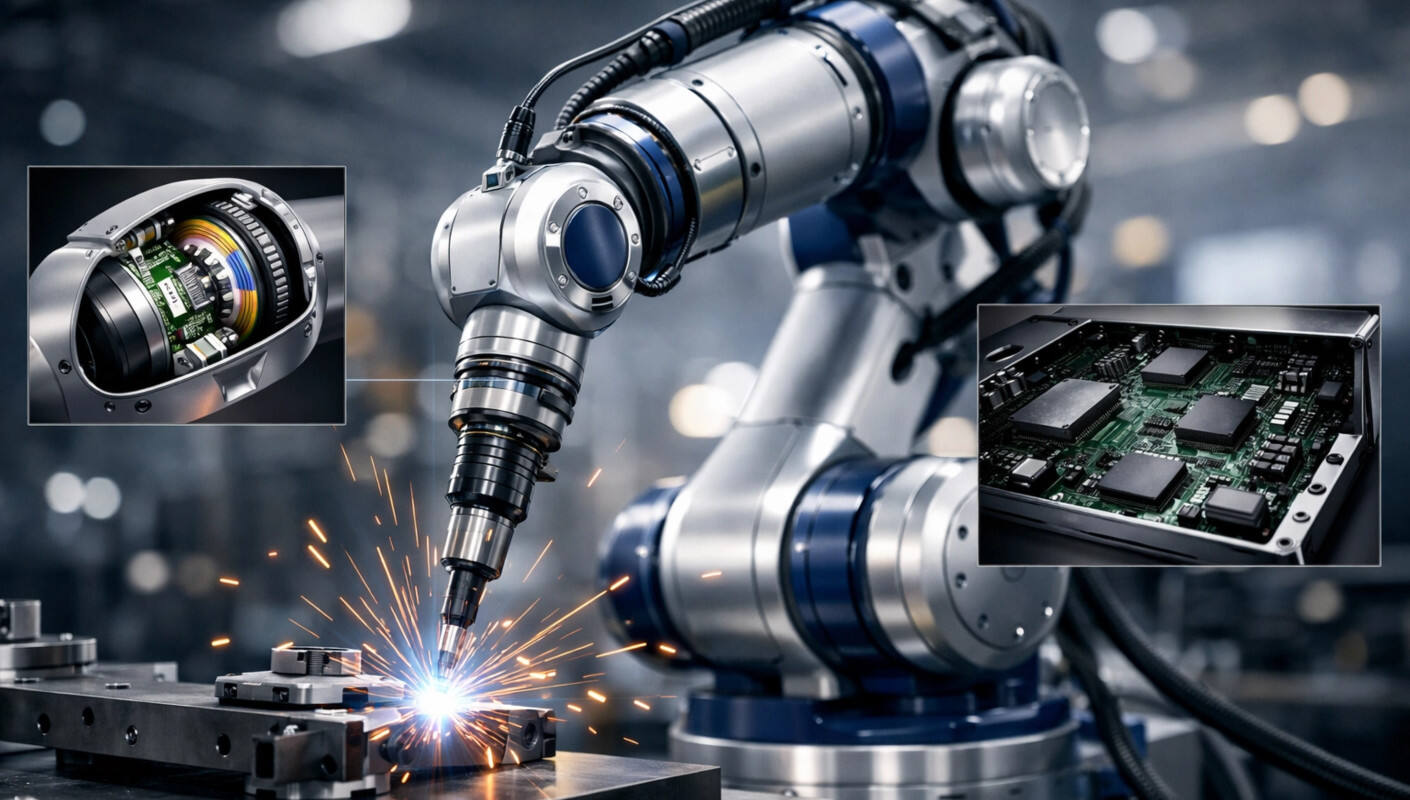
در سالنهای تولیدی با ظرفیت بالا در آمریکای شمالی و اروپا، حرکت بیصدا و ریتمیک بازوهای رباتیک، سرعت تولید را تعیین میکند. برای تکنسینهای نگهداری و مهندسان سیستمها که این ماشینها را نظارت میکنند، اولویت تنها یکی است: تکرارپذیری رباتی که حتی به میزان کسری از میلیمتر دقت خود را از دست بدهد، میتواند خط مونتاژ کاملی را متوقف کند.
در شرکت شنژن چوانشنگ الکترونیکس در شرکت ما، ما میدانیم که قابلیت اطمینان ربات ششمحوری به جریان بیوقفه دادهها بین مفاصل آن و کنترلکنندهٔ مرکزیاش بستگی دارد. این مقاله بررسی میکند که چگونه فناوریهای پیشرفتهٔ یکپارچه مدارها، سنسورها ، و کنترلهای اتوماسیون بهصورت هماهنگ عمل کرده و اطمینان حاصل میکنند که رباتهای صنعتی در سختترین محیطها نیز با کاملاً ثبات عمل میکنند.
۱. چالش تداخل الکترومغناطیسی در صنایع سنگین
یکی از مهمترین موانع در رباتیک صنعتی، اختلال الکترومغناطیسی است که اغلب به آن «تداخل الکترومغناطیسی» (EMI) گفته میشود. در محیط کارخانه، موتورهای قدرتمند، تجهیزات جوشکاری و ماشینآلات سنگین مقدار عظیمی نویز الکتریکی تولید میکنند. برای سنسورهای داخلی ربات، این نویز مانند مهی غلیظ است که ممکن است سیگنالهایی را که موقعیت دقیق بازوی رباتیک را به کنترلر اعلام میکنند، مخدوش سازد.
محافظت از مسیر سیگنال
از دیدگاه تکنسین سیمکشی، اتصال فیزیکی اولین خط دفاعی است. اتصالدهندههای استاندارد اغلب در این محیطها عملکرد مناسبی ندارند، زیرا محافظت کافی در برابر نویز را فراهم نمیکنند. راهحلهای اتصال تخصصی شوآنشنگ اتوماسیون و کنترلها دارای پوستههای محافظ ۳۶۰ درجه هستند. این طراحیها اطمینان حاصل میکنند که سیگنالهای دادهای پرسرعت—که اطلاعات حیاتی موقعیتیابی را منتقل میکنند—در برابر نویز الکتریکی خارجی محافظت شده و از «لرزش» (jitter) جلوگیری میکنند که منجر به خطاهای دقت میشود.
۲. هماهنگی محصولات اصلی: تسهیل هماهنگی چندمحوره
یک ربات صنعتی مدرن اثری هنرمندانه از حرکتهای هماهنگ است. این هماهنگی نیازمند سلسلهمراتب خاصی از اجزای الکترونیکی است:
الف. سنسورهای پرسرعت: ثبت حرکت در زمان واقعی
سنسورها نقطههای عصبی ربات هستند. در هر مفصل، انکودرهای چرخشی و سنسورهای گشتاور باید تغییرات مکان و نیرو را در عرض چند میکروثانیه تشخیص دهند. مجموعه سنسورهای ما بر نرخ نمونهبرداری بالا و خروجی با تأخیر کم تمرکز دارد. با استفاده از سنسورهایی با قدرت تفکیکپذیری بالا، امکان انجام وظایف ظریف توسط رباتها فراهم میشود؛ مانند مونتاژ قطعات الکترونیکی یا کالیبراسیون ابزارهای جراحی که هیچ فضایی برای خطایی وجود ندارد.
ب. مدارهای مجتمع: قدرت پردازشی پشت حرکت
دادههای این سنسورها باید بلافاصله پردازش شوند. اینجاست که مدارهای یکپارچه (ICها) که بهطور خاص برای کنترل موتور طراحی شدهاند، وارد عمل میشوند. این ICها در زمان واقعی، معکوس سینماتیک پیچیده را محاسبه کرده و توان ارسالی به هر موتور را تنظیم میکنند تا مسیری هموار حفظ شود. در شوآنشانگ، ما میکروکنترلرهای صنعتی و پردازندههای سیگنال دیجیتال (DSP) ارائه میدهیم که برای کارکرد مداوم و بیستوچهار ساعته رتبهبندی شدهاند و اطمینان حاصل میکنند که «مغز» ربات هرگز از کار نیافته و عملکردی بدون وقفه داشته باشد.
ج. اجزای غیرفعال : قهرمانان نادیدهگرفتهشدهٔ پایداری توان
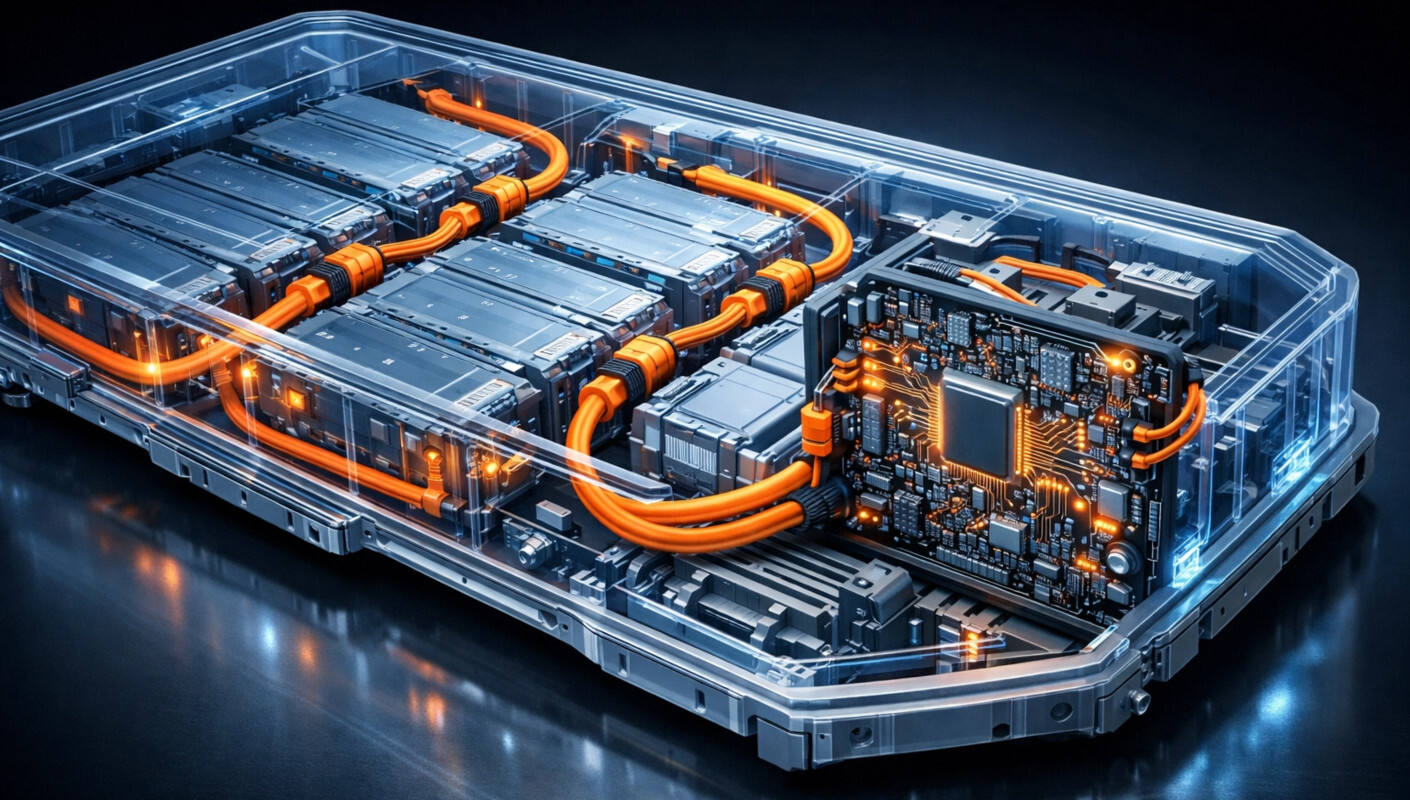
در حالی که ICها فکر میکنند، اجزای غیرفعال مانند خازنهای فیلتر با ظرفیت بالا و مقاومتهای دقیق، اطمینان حاصل میکنند که توان تأمینشده به تراشهها تمیز و پایدار باشد. در یک کنترلکننده رباتیک، نوسان ناگهانی ولتاژ میتواند باعث ریست شدن پردازنده شود. با تأمین خازنهایی با مقاومت سری معادل (ESR) پایین، به مشتریان خود کمک میکنیم تا ماژولهای توانی بسازند که بتوانند جریانهای سوئیچینگ سریع مورد نیاز موتورهای سروو با عملکرد بالا را تحمل کنند.
۳. مطالعه موردی کاربردی: بهینهسازی یک ربات همکار برای مونتاژ دقیق
مشکل: یک تولیدکنندهٔ آمریکای شمالی از رباتهای همکار (کوبوتها) با چالشی در مدل جدید خود که در بستهبندی دقیق دستگاههای پزشکی استفاده میشد، روبرو بود. در ساعات اوج عملیات، این رباتها گاهی اوقات «انحراف مکانی» تجربه میکردند و نیازمند بازتنظیم دستی هر چند شیفت بودند. این مشکل به انحراف حرارتی در تبدیلکنندههای آنالوگ به دیجیتال موجود در کنترلکنندههای مفاصل بازمیگشت.
راهحل شوانشنگ: پلتفرمی با مشخصات بالاتر مدار مجتمع با جبرانسازی دمایی داخلی و راهحلی قویتر برای راهحل تعبیهشده اجزای محافظت مدار برای مقابلهٔ بهتر با نیروی محرکهٔ الکترومغناطیسی معکوس (back-EMF) تولیدشده در هنگام توقفهای اضطراری.
نتیجه:
پایداری کالیبراسیون: مشکل انحراف کاملاً رفع شد و نیاز به بازتنظیم از هر هشت ساعت یکبار به هر شش ماه یکبار تغییر کرد.
دوام عملیاتی: رباتها کاهش قابلاندازهگیریای در تولید گرما درون پوششهای مفاصل نشان دادند که عمر مورد انتظار آببندیهای داخلی موتور را افزایش داد.
۴. تأمین دانش حرفهای: درک رتبهبندی حفاظت در برابر نفوذ و استحکام مکانیکی
برای کارگرانی که این سیستمها را در محیطهای سخت نصب میکنند، رتبهبندی حفاظت در برابر نفوذ (IP) مهمترین مشخصه فنی روی برگه دادههاست.
فراتر از رتبهبندی: اگرچه رتبه IP67 نشاندهنده حفاظت در برابر گرد و غبار و غوطهوری موقت در آب است، اما استحکام مکانیکی اتصالدهندهها نیز به همان اندازه حیاتی است. در رباتیک، کابلها بهطور مداوم خم میشوند. این امر نیازمند اتصالدهندههایی با تعداد زیادی چرخه قفلشدن و مکانیزمهای قفل مقاوم در برابر لرزش است.
نکته دانشی: هنگام انتخاب اتصالدهندهها برای ابزارهای «انتهای بازو» رباتیک، همیشه به دنبال اتصالدهندههای طراحیشده برای کاربردهای با انعطافپذیری بالا باشید. پینهای استاندارد ممکن است پس از میلیونها چرخه، ترکهای میکروسکوپی ایجاد کنند که منجر به خرابیهای متغیر میشوند؛ خرابیهایی که تشخیص آنها در خط تولید بسیار دشوار است.
۵. تحلیل صنعتی: ظهور محاسبات لبهای (Edge Computing) در رباتیک
بازار صنعتی جهانی در حال حرکت به سمت «هوش لبهای» (Edge Intelligence) است. به جای ارسال تمام دادههای حسگر به کابینت متمرکز، پردازش بیشتری در خود بازوی رباتیک انجام میشود.
در شوانشنگ، ما این روند را با ارائهٔ راهحلهای تعبیهشده ماژولهایی فشرده و یکپارچه که توان پردازشی و قابلیت اتصال را در یک واحد ترکیب میکنند، پشتیبانی میکنیم. این امر مقدار کابلکشی سنگین مورد نیاز در ساختار ربات را کاهش داده و باعث سبکتر، سریعتر و کارآمدتر از نظر انرژی شدن بازوها میشود. برای مشتریان ما در بخش خودروسازی اروپا، این تحول هزینهٔ کل مالکیت ناوگان رباتیک آنها را بهطور قابلتوجهی کاهش داده است.
نتیجهگیری: مهندسی برای آیندهٔ اتوماسیون
هدف از اتوماسیون صنعتی، حذف خطای انسانی و افزایش کارایی است. برای دستیابی به این هدف، الکترونیکهای زیربنایی باید از هرگونه انتقادی در امان باشند. شرکت شنژن چوانشنگ الکترونیکس متعهد است تا ارائهدهندهٔ نیمههادیهای گسسته، ICها ، و حسگرها با کیفیت بالا باشد که امکان تحقق این اهداف را فراهم میکند.
با تمرکز بر نیازهای خاص سازندگان رباتها—پایداری، دقت و دوام—ما اطمینان حاصل میکنیم که قلب کارخانههای مدرن بهطور کامل هماهنگ و دقیق کار میکند.